Tanmay_Panchal
Automotive
Hi everyone,
This can be considered as a followup on my last thread : HERE
Big shout-out to GregLocock for patiently helping the forums if you are reading this.
Anyways, apart from last development on templates. I was also able to solve the car pulling issue, apparently it was due to some incompatible tyre models which I changed. It seems newer 2018 ADAMS doesn't like if you just copy and paste old 2014 worked files. In the video below, one can see I was finally able to refine the model and even add graphics.
Link
So now I am able to run all the open loop steering control events. By open loop I mean events which are governed without any feedback from the events itself (like J turn, double lane change with maximum radius path, straight line acceleration, braking, maintain, etc...).
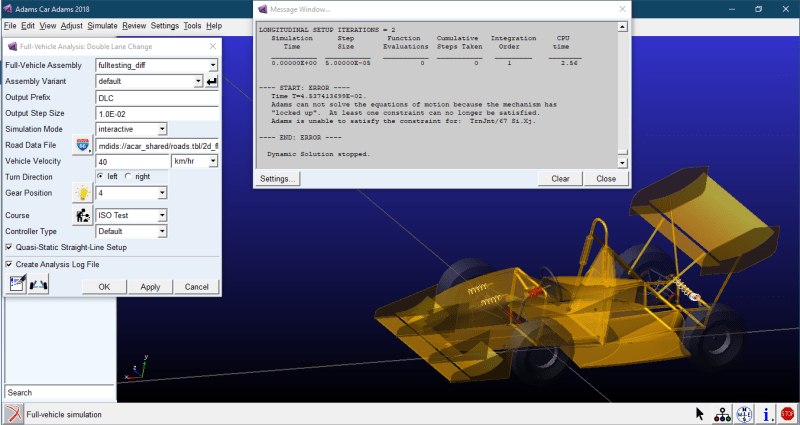
Only two creases are still left. I am not able to run any closed loop events. Events like double lane change with Default controller and 3D road, as well as skidpad holds which also takes feedback from events manipulating the throttle brake and steering demands. Looking at the messages it seems like there is some sort of PID control coded to make this happen, this is what is causing my model to give the error of lockup.
I am enclosing an image of a typical setup of DLC with just default controller (which crashes, crash file messages also enclosed as txt) and same DLC run with Max Radius path controller, running fine as shown in video.
It would be great if you guys can point me where to look, I am looking at DCF and DCD files but they are also not giving me much clues to start with. Besides it works if there is no sort of feedback but crashes immediately with feedback. In-fact if I apply straight line control to steering for maintain, it crashes because again it is taking some sort of feedback to keep the car straight.
I wish to understand the implementation of this control and how it can possible affect my simulation?
Goal is to make a universal FSAE template which can run any 3d course or follow path like the Ferrari model in there.
This can be considered as a followup on my last thread : HERE
Big shout-out to GregLocock for patiently helping the forums if you are reading this.
Anyways, apart from last development on templates. I was also able to solve the car pulling issue, apparently it was due to some incompatible tyre models which I changed. It seems newer 2018 ADAMS doesn't like if you just copy and paste old 2014 worked files. In the video below, one can see I was finally able to refine the model and even add graphics.
Link
So now I am able to run all the open loop steering control events. By open loop I mean events which are governed without any feedback from the events itself (like J turn, double lane change with maximum radius path, straight line acceleration, braking, maintain, etc...).
Only two creases are still left. I am not able to run any closed loop events. Events like double lane change with Default controller and 3D road, as well as skidpad holds which also takes feedback from events manipulating the throttle brake and steering demands. Looking at the messages it seems like there is some sort of PID control coded to make this happen, this is what is causing my model to give the error of lockup.
I am enclosing an image of a typical setup of DLC with just default controller (which crashes, crash file messages also enclosed as txt) and same DLC run with Max Radius path controller, running fine as shown in video.
It would be great if you guys can point me where to look, I am looking at DCF and DCD files but they are also not giving me much clues to start with. Besides it works if there is no sort of feedback but crashes immediately with feedback. In-fact if I apply straight line control to steering for maintain, it crashes because again it is taking some sort of feedback to keep the car straight.
I wish to understand the implementation of this control and how it can possible affect my simulation?
Goal is to make a universal FSAE template which can run any 3d course or follow path like the Ferrari model in there.