jmbdesign
Mechanical
- Feb 25, 2021
- 1
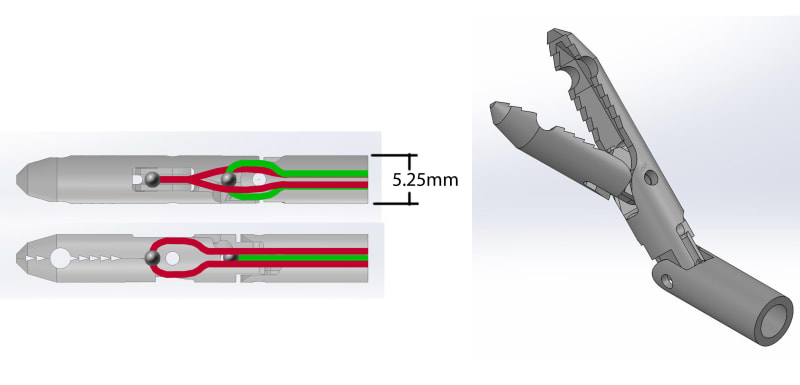
I'm trying to make a small grasper to use in tight spaces - it has two joints: one tilts the arm and the other controls the jaw. It uses .8mm diameter braided cable with a ball fitting to transfer force to the moving part. I'm trying to figure out how to make both joints independent, so moving one does not affect the other. The problem is that when I move the green joint, the arc length of the red cable changes. I can use capstans to account for the change in length, but how can I use the jaw while tilting the green joint at the same time?
Link
In this video at 7:55, the Intuitive surgical grasper shows this problem. Any ideas how this can be done?
Link
In this video at 7:55, the Intuitive surgical grasper shows this problem. Any ideas how this can be done?
")