Hi all,
I have somewhat a trivial question but can't find a solution.
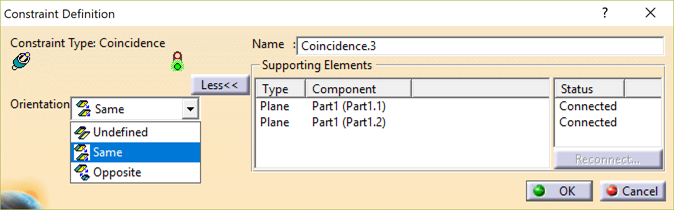
I have a sub-assembly of a shock absorber. It is represented as two fixed parts with a coincident mate to make the axial direction colinear. No other constraints exist.
The shock absorber is imported into the assembly and each end of the shock absorber is coincident mated to a point in space. The shock absorber is introduced as a flexible body.
Rather than the two parts of the damper facing each other, they face the opposite direction (point away from one another)
Can someone help me understand which constraint I need to control this?
Thanks
Kevin
I have somewhat a trivial question but can't find a solution.
I have a sub-assembly of a shock absorber. It is represented as two fixed parts with a coincident mate to make the axial direction colinear. No other constraints exist.
The shock absorber is imported into the assembly and each end of the shock absorber is coincident mated to a point in space. The shock absorber is introduced as a flexible body.
Rather than the two parts of the damper facing each other, they face the opposite direction (point away from one another)
Can someone help me understand which constraint I need to control this?
Thanks
Kevin