TerryZ5075
Aerospace
- May 7, 2022
- 4
Hello all,
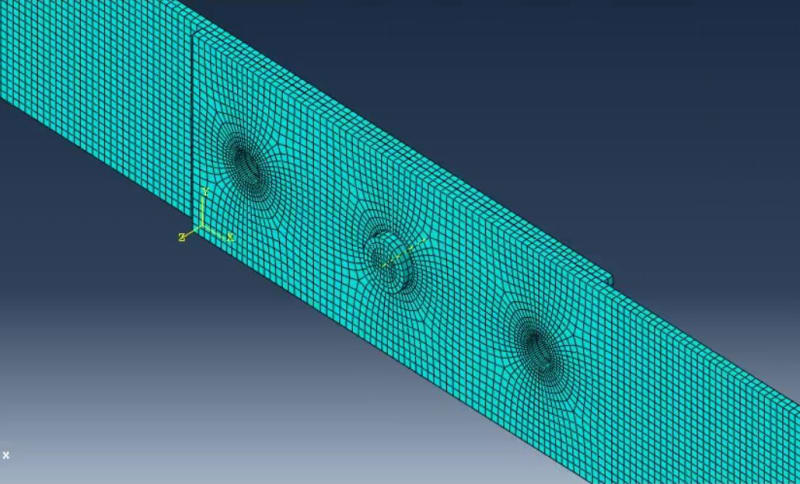
My model is a simple lap joint. Only one bolt is used in this model at this moment. One end of the joint is fixed, and the other end has a displacement B.C. of 0.01 inch.
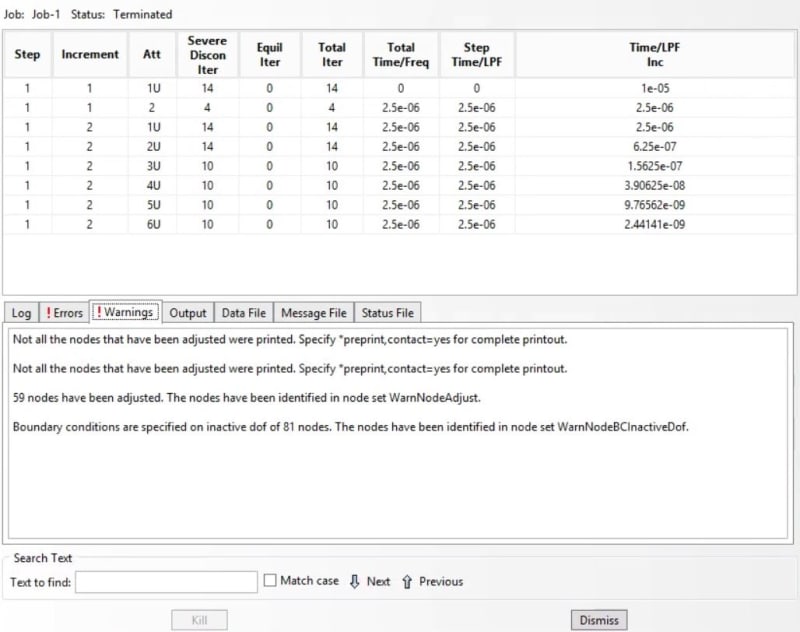
For step 1, I have the maximum number of increments of 1000, initial increment size of 1E-5, and minimum of increment size of 1E-20.
For interaction, I have a general contact where I selected 5 contact pairs, instead of using "all with self". I also tried "surface to surface contact with small sliding". It doesn't converge either.
some screenshots are attached. Appreciate any advise. Thanks.
My model is a simple lap joint. Only one bolt is used in this model at this moment. One end of the joint is fixed, and the other end has a displacement B.C. of 0.01 inch.
For step 1, I have the maximum number of increments of 1000, initial increment size of 1E-5, and minimum of increment size of 1E-20.
For interaction, I have a general contact where I selected 5 contact pairs, instead of using "all with self". I also tried "surface to surface contact with small sliding". It doesn't converge either.
some screenshots are attached. Appreciate any advise. Thanks.