drennon236
Civil/Environmental
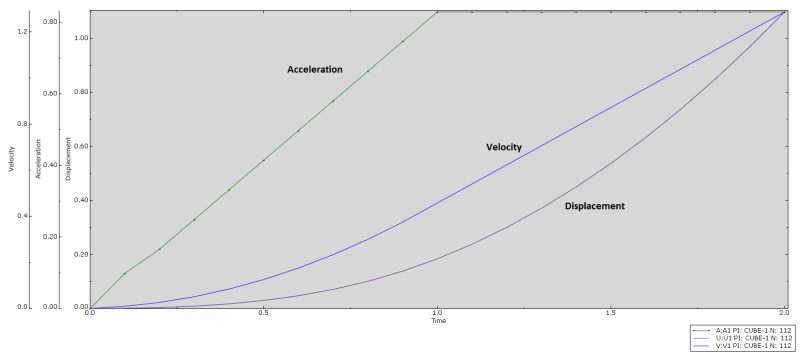
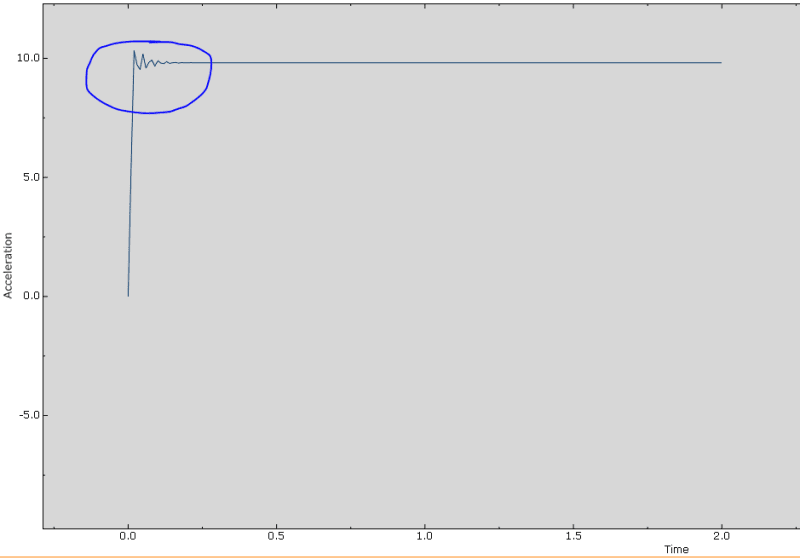
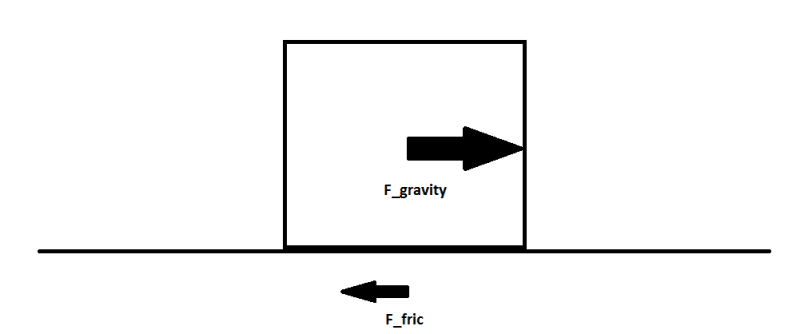
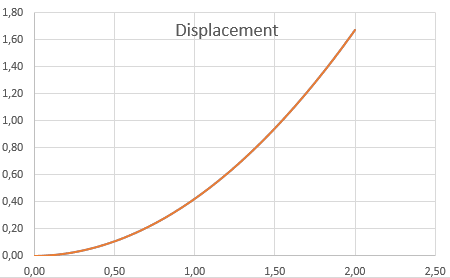
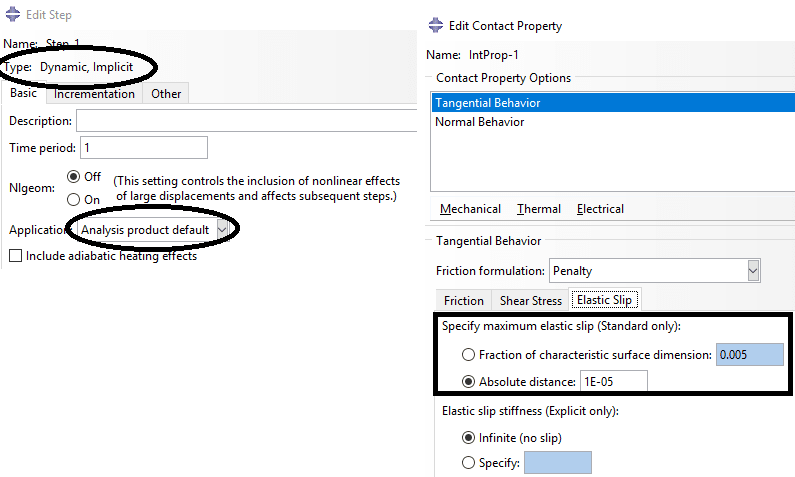
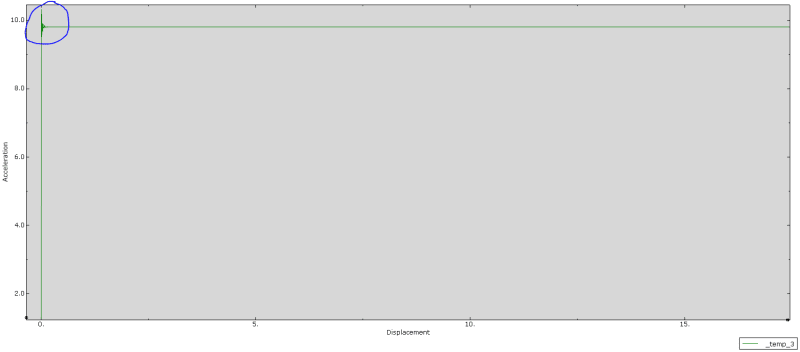
I am trying to understand the difference between the two models; The obvious one is that the penalty formulation has an elastic slip before reaching the slipping state, while the classic coulomb goes directly from sticking to slipping. I am working with a box on a plane, and I want to simulate a box on a plane which is pushed by a force, and then compare the Abaqus velocity, acceleration, and displacement vs time plot with analytical results. Will the results be similar? I tried running simulations, and got the same constant acceleration after elastic slip, but otherwise the Abaqus and analytical results do not match, and I am not sure if my model is incorrect or if the two models are incomparable.
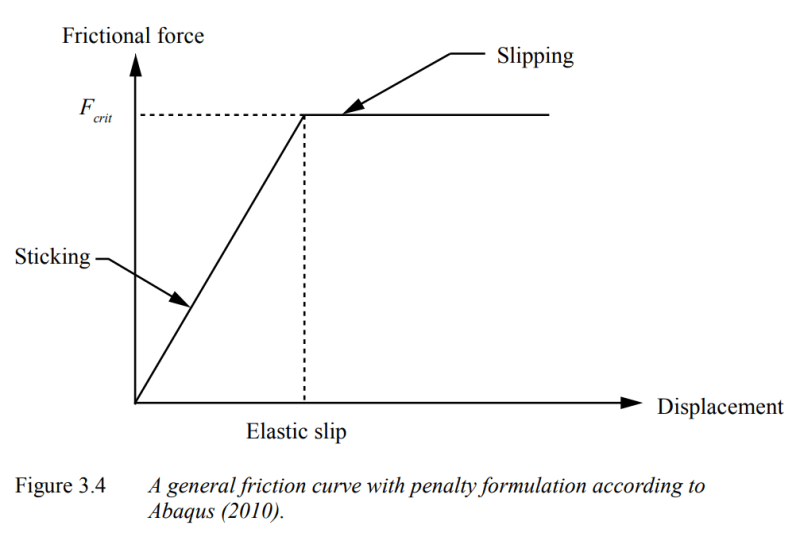
"In reality the elastic slip is assumed to correspond to the elastic displacement in the surface roughness." - is the elastic slip the displacement required for the box to "break free" from the plane? Does this elastic slip exist in the classic coulomb friction model?
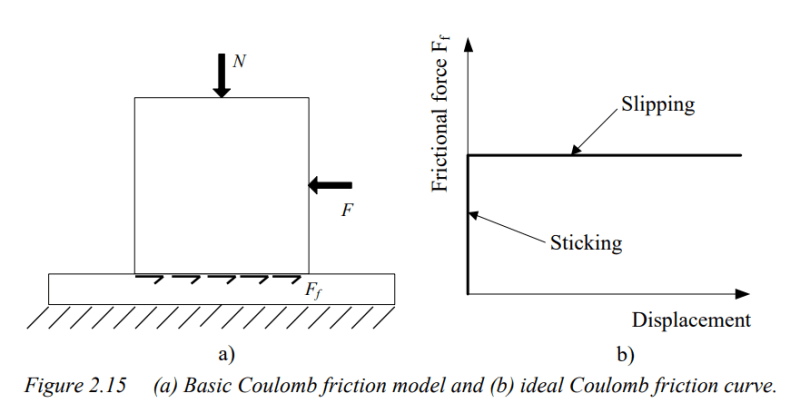
"In reality the elastic slip is assumed to correspond to the elastic displacement in the surface roughness." - is the elastic slip the displacement required for the box to "break free" from the plane? Does this elastic slip exist in the classic coulomb friction model?