I am reading the difference between penalty method and Lagrange method for contact enforcement. I am having some trouble understanding how Lagrange works. In the text I found it says Lagrange has the following disadvantages, and I had some clarifying questions;
i. Can make it challenging for Newton iterations to converge
Is it more challenging because it requires more iterations compared to penalty method?
ii. Overlapping constraints are problematic for equation solver
I have read what overlapping constrainsts are (If two tie constraint definitions have part or all of their master surfaces in common), but how does this relate to equation solver, and by equation solver are they talking about for example Newton-Raphson method?
iii. Lagrange multipliers add to equation solver cost
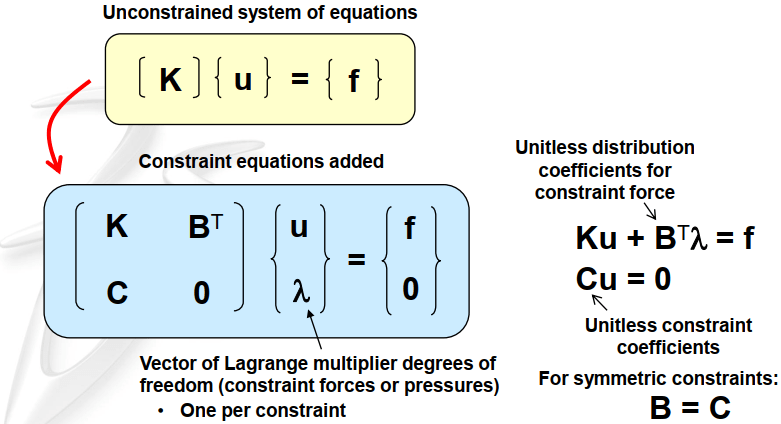
For each constraint, another λ is added to the right vector?
i. Can make it challenging for Newton iterations to converge
Is it more challenging because it requires more iterations compared to penalty method?
ii. Overlapping constraints are problematic for equation solver
I have read what overlapping constrainsts are (If two tie constraint definitions have part or all of their master surfaces in common), but how does this relate to equation solver, and by equation solver are they talking about for example Newton-Raphson method?
iii. Lagrange multipliers add to equation solver cost
For each constraint, another λ is added to the right vector?