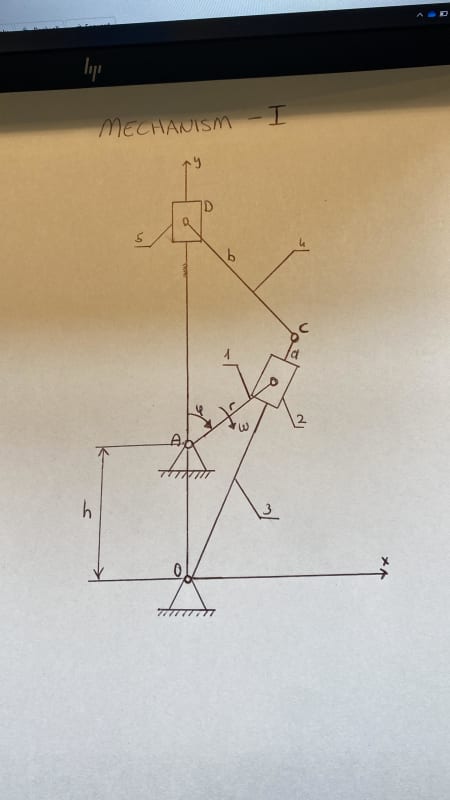
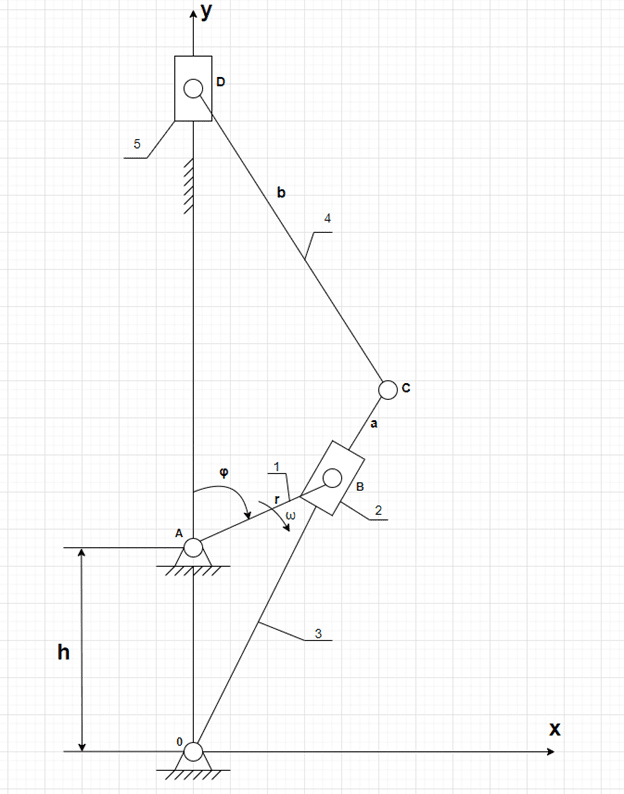
no ... omega is really phi_dot. phi and r give you the cartesian co-ords of the end of the radius, pt B ?
does B slide along 0-C ?
is "a" the length of the slider, or is "a" a fixed length between B and C ?
ok, you're a beginner, fine, we all start at square 0. What have you read about mechanisms ?
don't expect we (well, me) will post the answer to the problem, that IMHO doesn't help you learn.
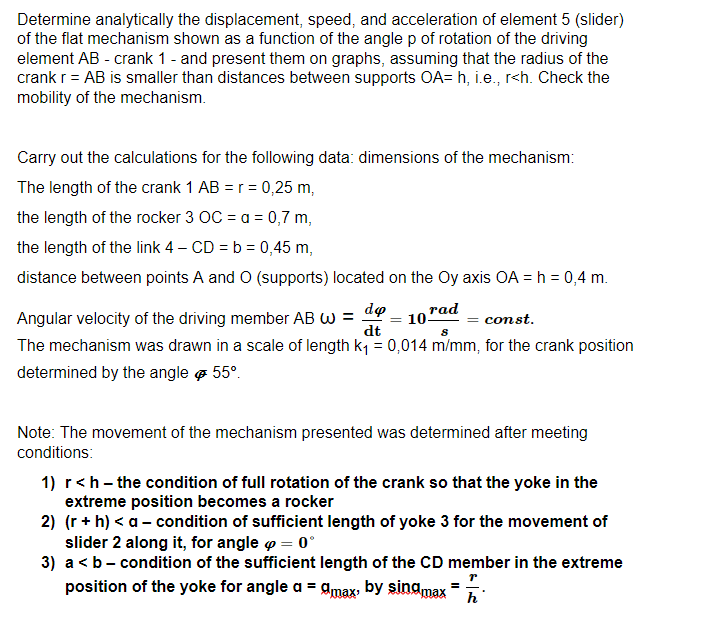
if omega is constant then the radius rotates about 0 and you can determine the co-ords of the end of the radius as a function of time. As you know, the end of the radius moves with a speed of omega*r. As the end of the radius moves, how does length 3 change ? look at some "obvious" positions, run excel with many values of phi. how long does it take for phi to change by 1 degree ? plot the results, some patterns may become visible. how does pt C and D move ?
GL
"Hoffen wir mal, dass alles gut geht !"
General Paulus, Nov 1942, outside Stalingrad after the launch of Operation Uranus.