Hello,
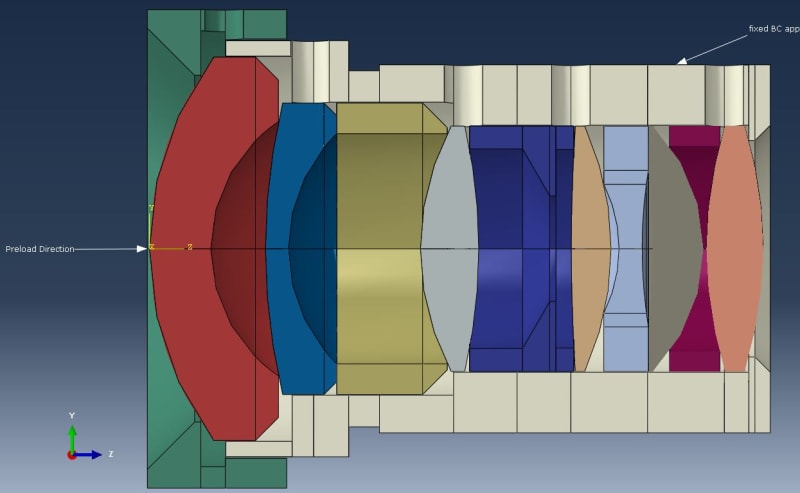
First off, I am new to modeling vibration/dynamics in Abaqus so most likely there are some basic errors that I am making. I am trying to set up an analysis that includes setting a preload on a series of optics and then look at how that preloaded system reacts to a frequency sweep. This seems like it should be a pretty straightforward set up but I am in this vicious loop. I can create the steps to apply the preload but I can't then add a frequency step after those steps because that has to be the first step in the analysis. But, when I create the frequency model first and then apply the preloads I can't create the dynamic steps(s) that I need do the frequency sweep. I've tried restarts and initial state but I can't figure out the order of the steps to get what I need. For the frequency I don't need the preload but for the dynamics step(s) I will need them.
Thanks,
Dan
First off, I am new to modeling vibration/dynamics in Abaqus so most likely there are some basic errors that I am making. I am trying to set up an analysis that includes setting a preload on a series of optics and then look at how that preloaded system reacts to a frequency sweep. This seems like it should be a pretty straightforward set up but I am in this vicious loop. I can create the steps to apply the preload but I can't then add a frequency step after those steps because that has to be the first step in the analysis. But, when I create the frequency model first and then apply the preloads I can't create the dynamic steps(s) that I need do the frequency sweep. I've tried restarts and initial state but I can't figure out the order of the steps to get what I need. For the frequency I don't need the preload but for the dynamics step(s) I will need them.
Thanks,
Dan