M MOTAAL
Structural
- Aug 22, 2018
- 22
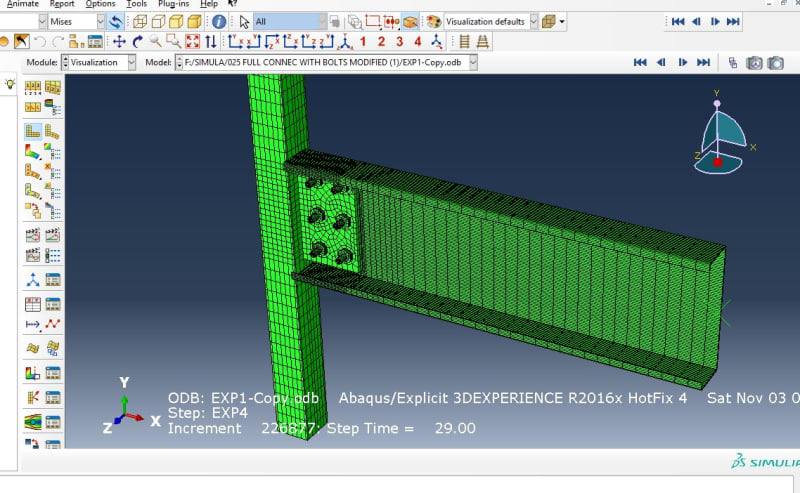
Hi everybody. I have the created and submitted the model in the figure attached below. I need to know how I can extract the moment curvature of the connection just to get rotational stiffness during different stages of loading and steps. I have surfed the net to find a solution but all what I got is how to get the moment using section cut. Is maintaining the rotation needs some like procedure? and if it's right to get the moment from free body section cut where should I take my section is is it to be along the whole connection or only through a specific object such as the beam for example and how to get the rotation?. Any help is greatly appreciated and thank you in advance.
") . It is perhaps a trade off between the smallest step to total time (in explicit), and the amount of cut back/substeps needed in implicit (in order to obtain convergence). I would just let it run over the weekend.
. It is perhaps a trade off between the smallest step to total time (in explicit), and the amount of cut back/substeps needed in implicit (in order to obtain convergence). I would just let it run over the weekend.