SC83
Mechanical
- Jun 8, 2018
- 24
I want to calculate the inertia of a SCARA robot. The arms/end effector move only in the XY-plane by rotating its 3 arms.
How do I calculate the total inertia around the Z-axis?
I_arm_1_Z = I_arm_1_COG + m1.r1^2
I_arm_2_Z = I_arm_1_COG + m2.r2^2
I_arm_3_Z = I_arm_3_COG + m3.r3^2
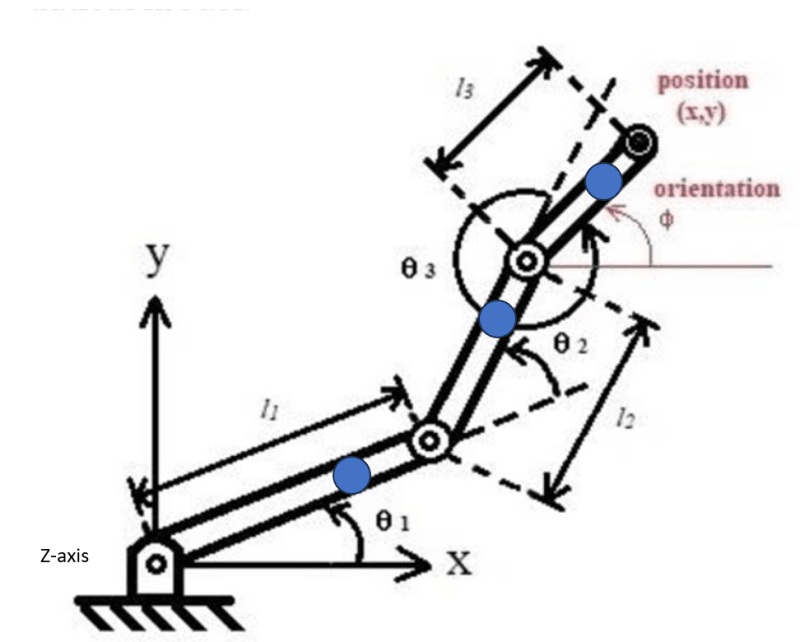
I which r1, r2, r3 is the shortest disctance from each point mass (represented with a blue dot) to the Z-xis.
Or should I define for arm_2 and arm_3 the distance r2 and r3 wrt to their own rotation point, i.e. the joint_theta_2 and joint_theta_3?
The image below is the top view.
How do I calculate the total inertia around the Z-axis?
I_arm_1_Z = I_arm_1_COG + m1.r1^2
I_arm_2_Z = I_arm_1_COG + m2.r2^2
I_arm_3_Z = I_arm_3_COG + m3.r3^2
I which r1, r2, r3 is the shortest disctance from each point mass (represented with a blue dot) to the Z-xis.
Or should I define for arm_2 and arm_3 the distance r2 and r3 wrt to their own rotation point, i.e. the joint_theta_2 and joint_theta_3?
The image below is the top view.