Many thanks to you dear Cyprek for the detailed explanation and for the link.
you have right L-1 is a fourth-order tensor. I would be so thankful if you can verify if this I write is correct.
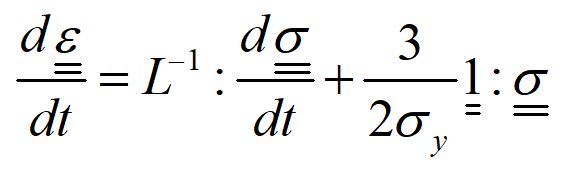
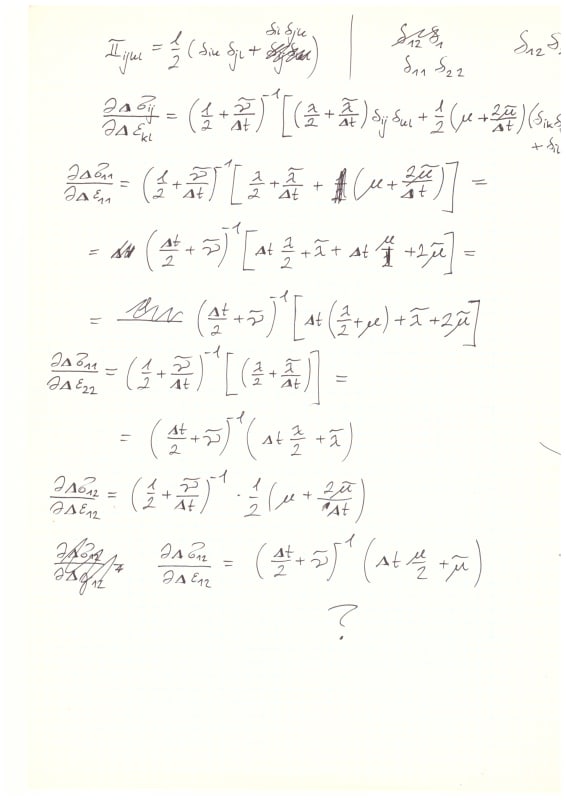
I multiply the équation above by the fourth-order tensor L (Hooke's law), my problem is 2D so :
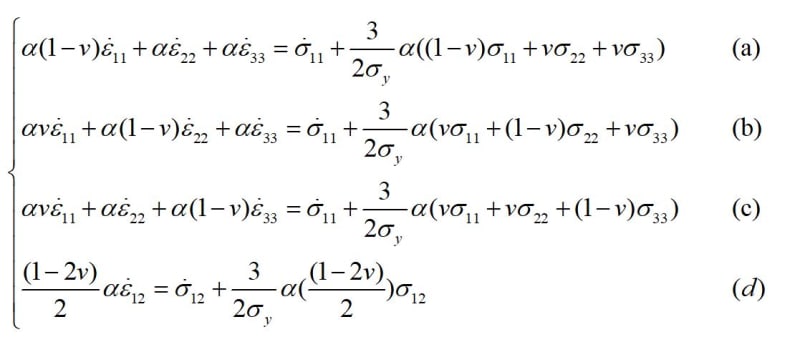
I found the equation system (a, b, c, d) below, alpha and nu are constant:
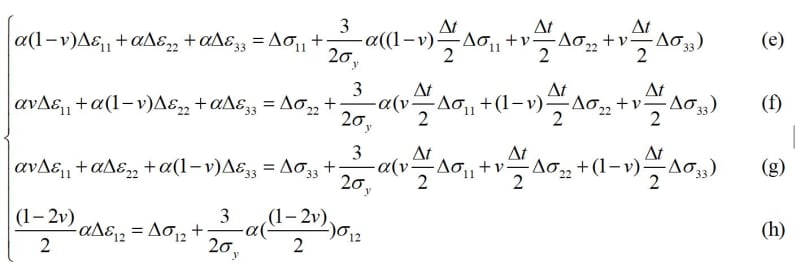
Then I use the example you have sent to me and I obtain the equation system(e,f, g, h):
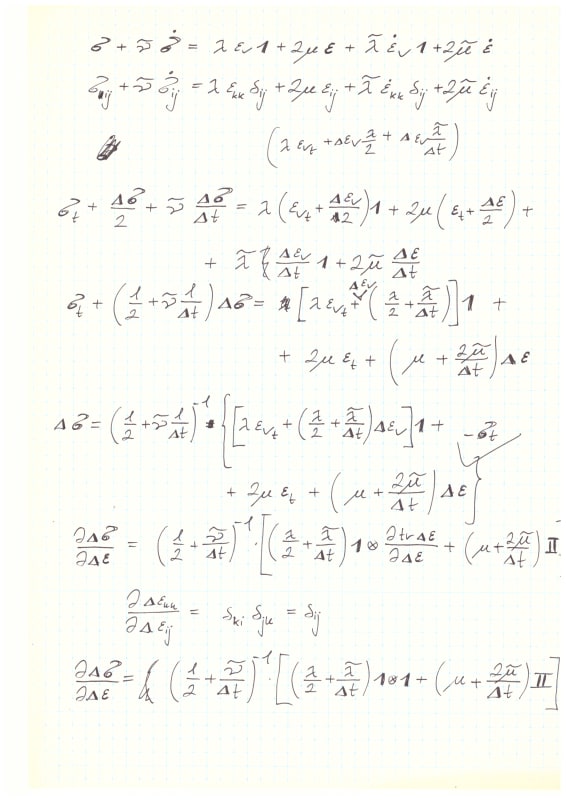
but how I can obtain the DDSDDE?
Thanks in advance for your help
Best regards