Hi all,
I am trying to model bolted joints for double shear (coupon level) with contact beams method, using *INITIAL_AXIAL_FORCE_BEAM and dynamic relaxation(DR). I have got the model to initialise successfully with correct preload as desired. However, I found that the DR stage takes too long. In order for DR to converge after pre-load rampup (pseudotime > load rampup time), I have to have a very tight tolerance (DRTOL) of 1E-09! This however takes way too long to initialise even on my coupon level model. As the motivation is to apply the learning from this into full vehicle model, such long time for DR to converge is not feasible. So I have tried few things to try and improve the situation - please see the attachment.
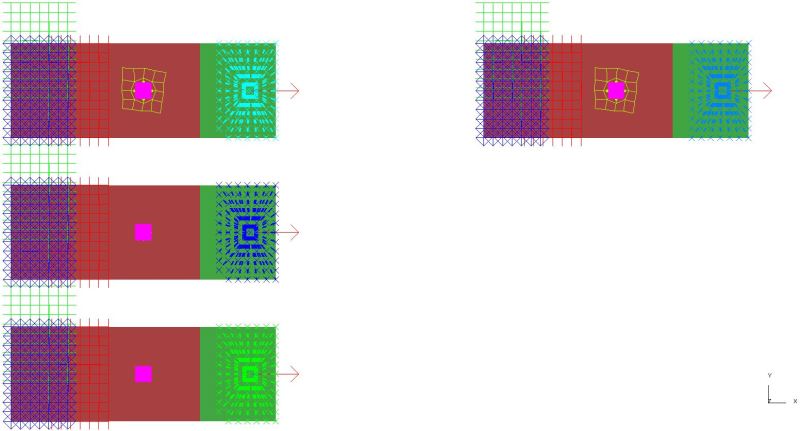
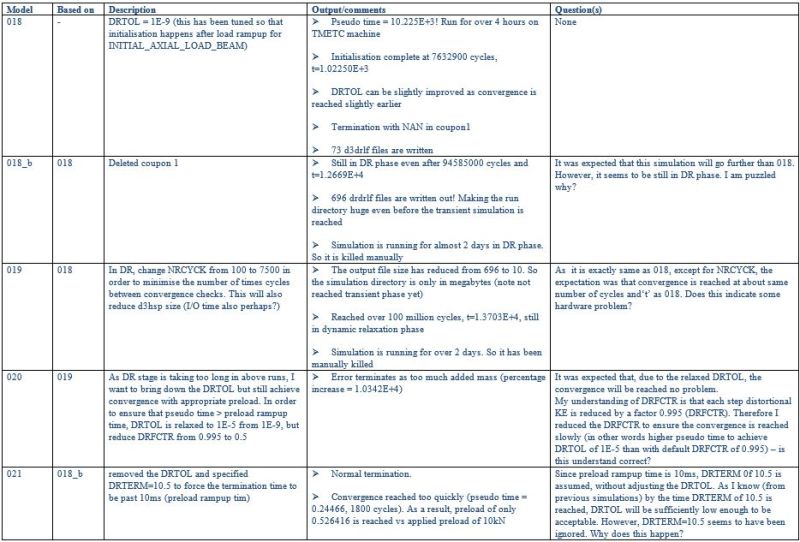
In a short summary, I am trying to optimise the dynamic relaxation phase so that it can be used in full vehicle simulation without excessive & un-necessary run time penalties. However, I am struggling to make sense of the output I am seeing. Request someone to please help me understand.
Thanks,
I am trying to model bolted joints for double shear (coupon level) with contact beams method, using *INITIAL_AXIAL_FORCE_BEAM and dynamic relaxation(DR). I have got the model to initialise successfully with correct preload as desired. However, I found that the DR stage takes too long. In order for DR to converge after pre-load rampup (pseudotime > load rampup time), I have to have a very tight tolerance (DRTOL) of 1E-09! This however takes way too long to initialise even on my coupon level model. As the motivation is to apply the learning from this into full vehicle model, such long time for DR to converge is not feasible. So I have tried few things to try and improve the situation - please see the attachment.
In a short summary, I am trying to optimise the dynamic relaxation phase so that it can be used in full vehicle simulation without excessive & un-necessary run time penalties. However, I am struggling to make sense of the output I am seeing. Request someone to please help me understand.
Thanks,