rstupplebeen
Mechanical
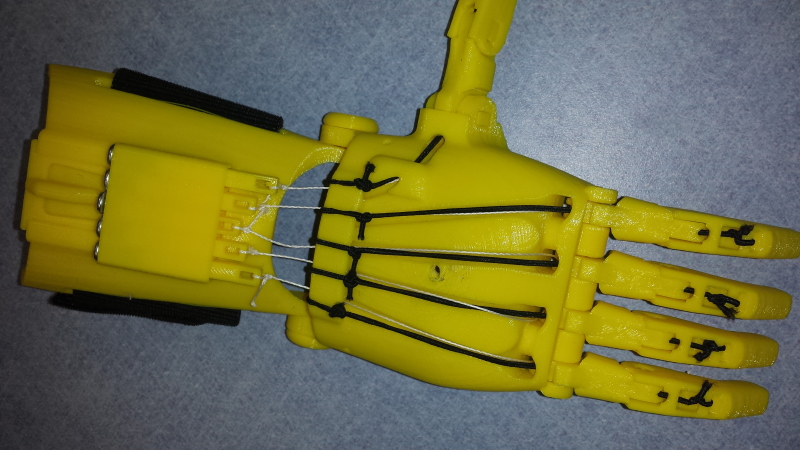
I am working on a project where joints are actuated by rope and bungee cords. Both of these are modeled with 3D splines because they follow a complex path. Can someone provide some best practices for this type of system?
Ideally neither the the rope or bungee would support bending or compression loads. These should also be pretensioned.
Thank you very much for your help.
Rob

Rob Stupplebeen
OptimalDevice.com/blog
Rob's LinkedIn
Ideally neither the the rope or bungee would support bending or compression loads. These should also be pretensioned.
Thank you very much for your help.
Rob
Rob Stupplebeen
OptimalDevice.com/blog
Rob's LinkedIn
")