Literature:
The Cowern Papers are a good starting place.
Cowern Papers
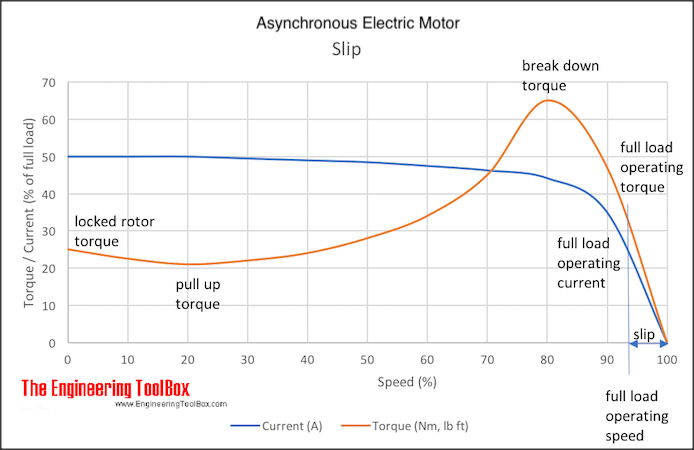
There is a problem with the graph that you have posted.
The numbers on the right-hand side are wrong.
Refer to the graph on age 3 of the Cowern Papers.
The most common motor, the design "B" starts with a locked rotor torque of about 150% and a breakdown torque of about 200%.
Starting current, when started Direct On Line is about 600%.
We used that curve for decades (the curve in the Cowern Papers), until VFDs became common. With a VFD it is still the same curve but a different way of reading it. More on that later.
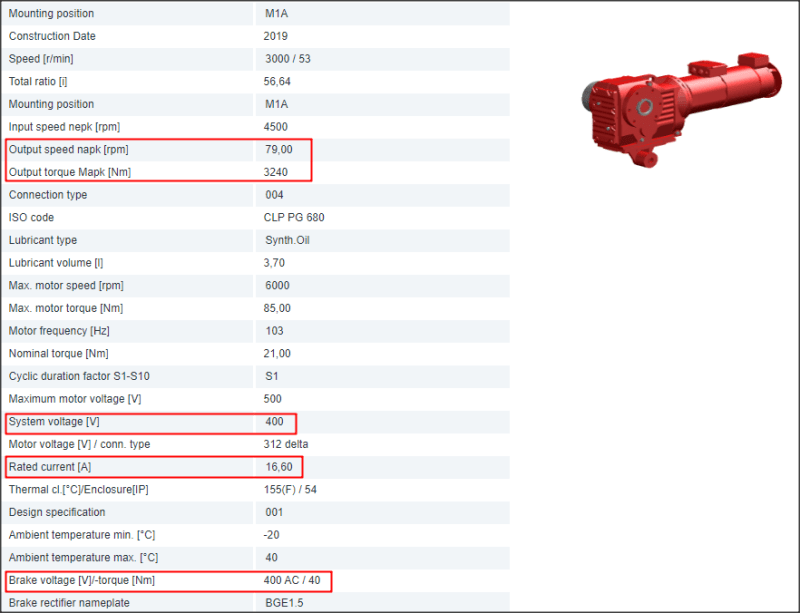
Question #1 Where did you get the power 28,6 kW and why did you compare it to 6,6 kW for maximum torque for gear box?
Answer; I used your calculations. "If I calculate from output data on reduction output shaft, I get: P = M * omega = 3240 Nm * Pi * 79 / 30 = 26,8 kW."
The accuracy is not important. The point is that the rating is reasonable for motor breakdown torque plus a safety factor.
Think; "Sudden jam plus shock loading."
Question #2 Since my calculated power on the gear box output shaft is so big, I assume that I can't use Output speed (napk) and Output torque (Mapk) for gear box output shat power calculation or in other words Mapk isn't on output when napk is and vice versa.
Answer #A Use the motor rated torque times the gearbox ratio to calculate the maximum working torque of the output.
Use the maximum values to calculate forces and reaction forces. This will be short duration overloads, so that the machine does not destroy itself the first time it is inadvertently driven to breakdown torque.
Answer "B" This motor is a nominal 3000 RPM motor. That is based on the number of poles in the motor and the applied frequency.
It appears that the motor is controlled by a VFD with a maximum frequency of 103 Hz.
The nominal speed at 103 Hz is (3000 RPM / 50 Hz) x 103 Hz = 6180 RPM. The HP will be the same and so the rated torque at 6180 RPM must be (50 Hz / 103 Hz = 48.5% of the torque at 50 Hz.
Question #3 "If the motor power is 10 kW, then gear box output power is around 9 kW, if efficiency of 0,9 for gearbox is used."
Yes.
Question #4 " Where on AC motor torque curve is maximum torque 85 Nm located? Is that locked rotor torque or break down torque?"
Answer; The most important factor when a motor is driven by a VFD is not often emphasized. That is the slip.
What is the slip? A squirrel cage induction motor runs slower than synchronous motor. The slip generates the driving force.
A motor designed for 50 Hz may have a synchronous speed of 1500 RPM but a rated speed in a range of 1425 RPM to 1480 RPM
Or it may have a synchronous speed of 3000 RPM but a rated speed of 2850 RPM to 2925 RPM.
For our example we will work with a motor rated at 2900 RPM. The slip at full load is
3000 - 2900 = 1000 RPM.
100 RPM / 3000 RPM is 3.3% slip.
Now on the motor speed/torque graph, add the slip RPM across the bottom line. Note: using a percentage here will not work.
Now 100% of synchronous speed, 3000 RPM = 0 RPM slip.
A rated speed of 2900 RPM = 100 RPM slip.
We are concerned with the slip RPM
There is a fairly linear relationship between slip and torque, from zero slip RPM to 200 RPm slip.
100 RPM slip equates to 1.67 Hz. That is the frequency that the rotor sees, and that is the major factor determining the torque.
DOL starting. The slip is 2900 RPM and the torque is about 150% of rated torque.
As the motor accelerates, the torque follows the speed/torque curve.
When a motor is started with a VFD, a low frequency is applied.
As the frequency is increased from zero, the torque increases. As the motor starts to turn, the slip RPM drops and the current drops.
When reading the graph for a VFD controlled motor, the region of interest is from synchronous speed to the breakdown torque peak.
Notes:
1 Use slip RPM, not percentage.
2 100% speed is not the rated motor speed, it is the speed equivalent to the frequency applied by the VFD.
3 The load determines the torque that is demanded.
4 Hard to start loads may be supplied with about 200% of rated torque for starting duty when driven by a VFD. DOL will provide only 150% of rated torque.
That's enough for now.
Look this over and come back for more questions and clarifications.
Feel free to jump in with corrections, jraef.
Bill
--------------------
"Why not the best?"
Jimmy Carter
![[bigsmile]](/data/assets/smilies/bigsmile.gif "[bigsmile] [bigsmile]")