Long shot but does anyone either know what the reference is or have a PDF copy of the reference on Enercalc's help page under the "Analysis Procedure" heading here: Link
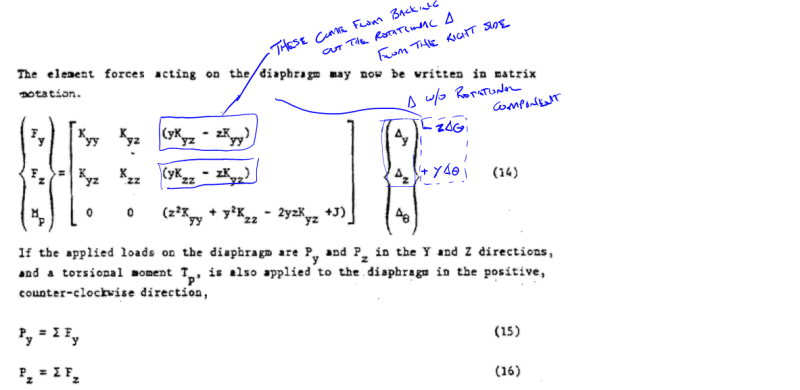
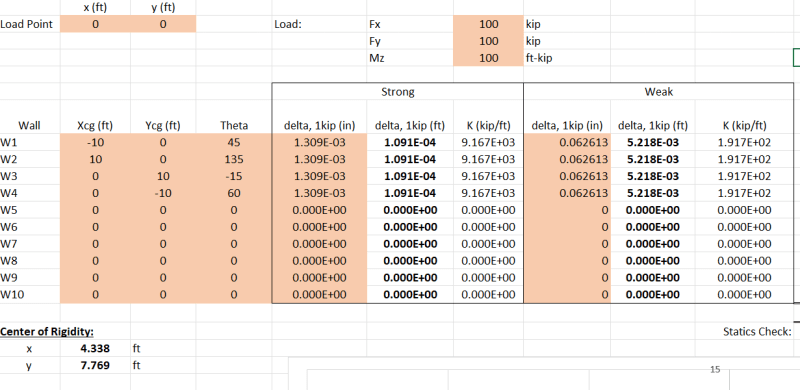
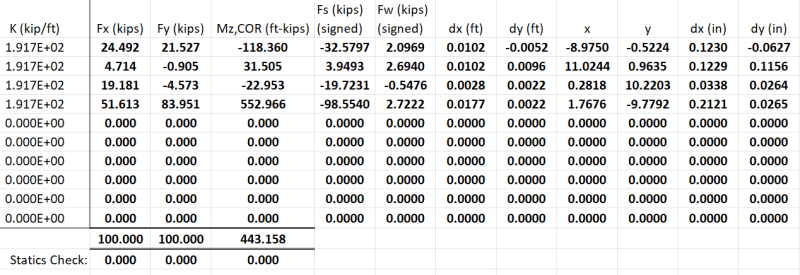
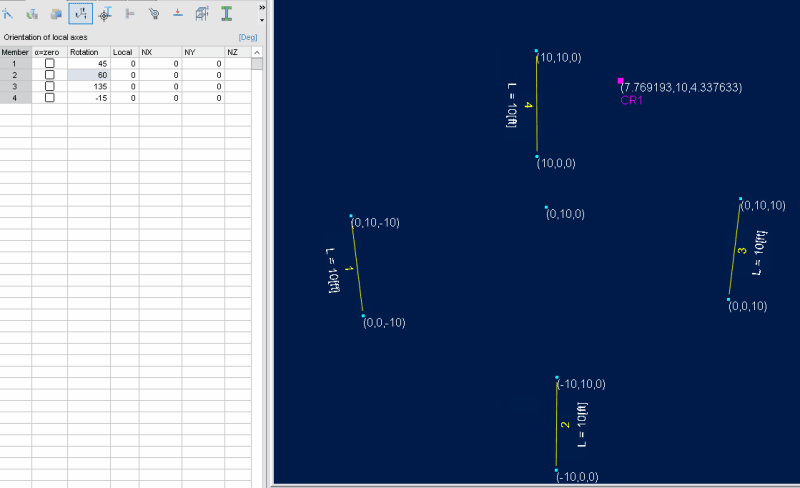
or alternatively know how to or have a good reference for assembling the global stiffness matrix for the system in the attached sketch:
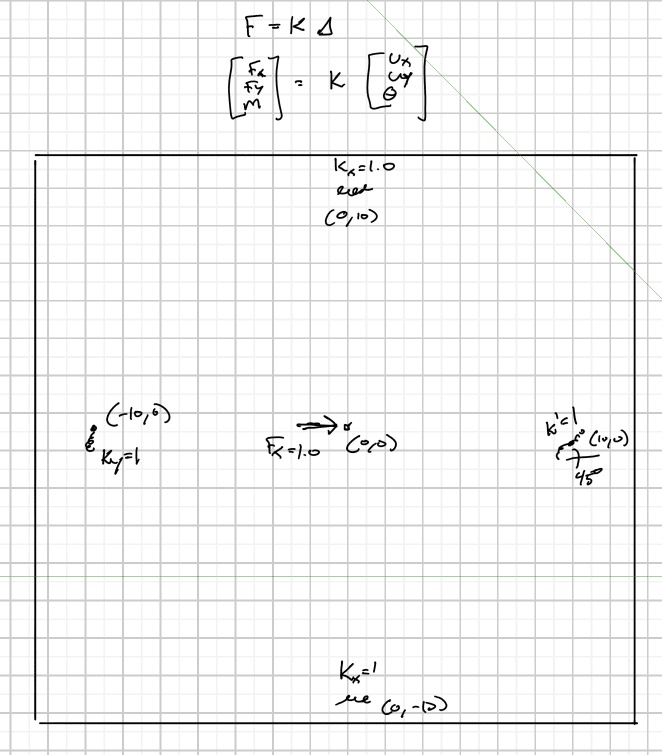
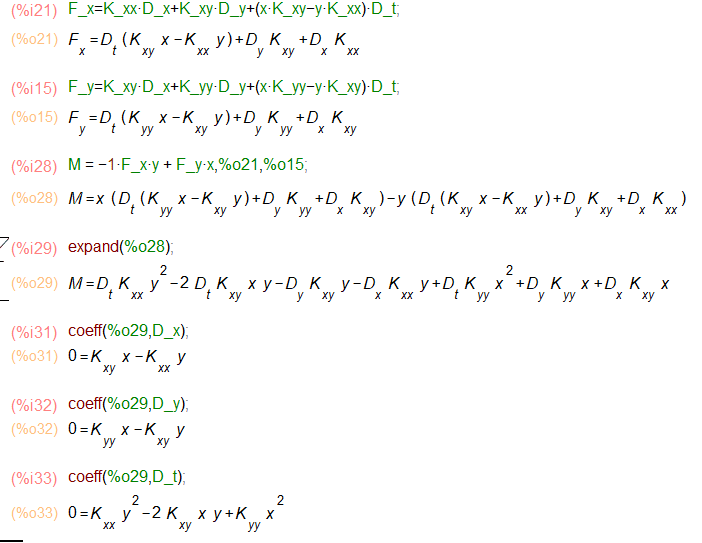
I'm getting tripped up with the formulation of the K's for the rotational degree of freedom.
I get the following for just the translational K's
[[1,0],[0,0]] + 2*[[0,0],[0,1]] + [[0.5,0.5],[0.5,0.5]] = [[1.5,0.5],[0.5,2.5]]
where the 0.5 K matrix comes from the transformation for the 45 degree spring using [[C^2,CS],[CS,S^2]] where C=Cosine and S=Sin which is a reduced form of the full transformation matrix.
From the linked reference that would lead me to:
[10,0,0] = [[1.5,0.5,Ktheta1],[0.5,2.5,Ktheta2],[0,0,Ktheta]].[Ux,Uy,Utheta]
I attempted using the Ktheta definitions from the link but I was not able to determine the J term in the lower right Ktheta term and applying what I did come up didn't result in any rotation for the system which, looks to be an issue with the last row which would take the form: 0 = 0 + 0 + Ktheta*Utheta which would seem always result in a Utheta=0?
My Personal Open Source Structural Applications:
Open Source Structural GitHub Group:
or alternatively know how to or have a good reference for assembling the global stiffness matrix for the system in the attached sketch:
I'm getting tripped up with the formulation of the K's for the rotational degree of freedom.
I get the following for just the translational K's
[[1,0],[0,0]] + 2*[[0,0],[0,1]] + [[0.5,0.5],[0.5,0.5]] = [[1.5,0.5],[0.5,2.5]]
where the 0.5 K matrix comes from the transformation for the 45 degree spring using [[C^2,CS],[CS,S^2]] where C=Cosine and S=Sin which is a reduced form of the full transformation matrix.
From the linked reference that would lead me to:
[10,0,0] = [[1.5,0.5,Ktheta1],[0.5,2.5,Ktheta2],[0,0,Ktheta]].[Ux,Uy,Utheta]
I attempted using the Ktheta definitions from the link but I was not able to determine the J term in the lower right Ktheta term and applying what I did come up didn't result in any rotation for the system which, looks to be an issue with the last row which would take the form: 0 = 0 + 0 + Ktheta*Utheta which would seem always result in a Utheta=0?
My Personal Open Source Structural Applications:
Open Source Structural GitHub Group: