-
1
- #1
My use case for this is really rough survey stuff so putting it in the Structural forums.
I recently got a much needed cell phone upgrade and found myself with a phone that has a lidar sensor along with the cameras.
The sensor is terrible for fine detail but for big dimensions like wall to wall distance it gets passable results and gives me a way to do some cheap 3D scans on the quick for context when back in the office.
It took a bit to find a process to make usable output for Revit but found two paths:
First off here is what the raw exported obj file looks like, it's pretty muddy (fine detail is lost but big stuff like the width of my oven and height of my countertop are ok)

Path 1:
Use MeshLab to export a dxf file, this DXF is the 3D Mesh (you may want to do some mesh simplifications prior to exporting)
Link to Meshlab: Link
In Revit under the Massing and Site tab model an in place Mass and import the DXF to the Mass
(it needs to be brought into a Mass otherwise floor cut planes and sections won't clip the mesh)
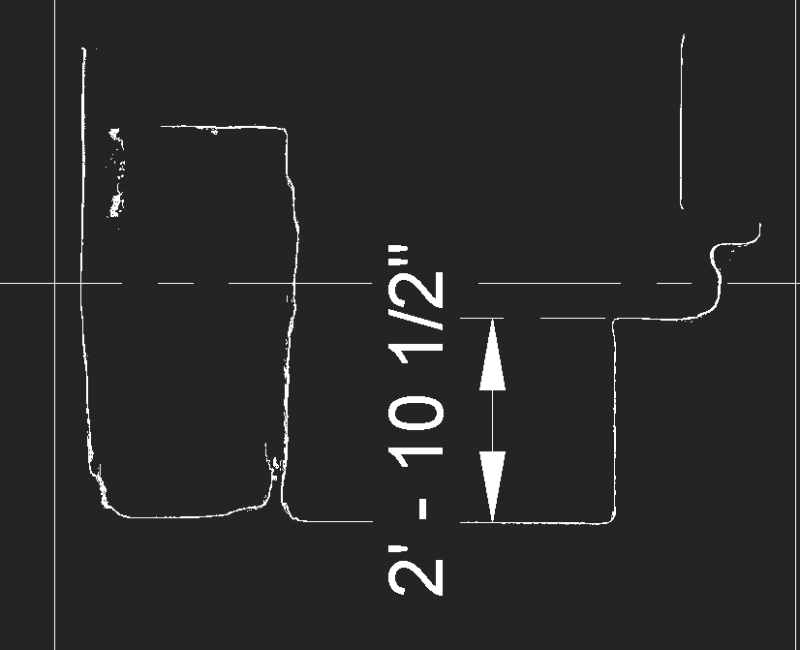
Mesh DXF in Revit:

Section thru counter/floor (actual tape measure 2'- 10 3/4"):
Path 2:
Using the following python code pull out the vertices from the OBJ file and write an .XYZ point cloud file:
Using the Free Trial Version of Autodesk Recap (ability to save project .rcp appears to persist after trial ends) import the .xyz file and index with Recap to a .rcp file (for the app I use to export up is y not z)
Link to Autodesk Recap: Link
In Revit import a point cloud and pick the RCP file.
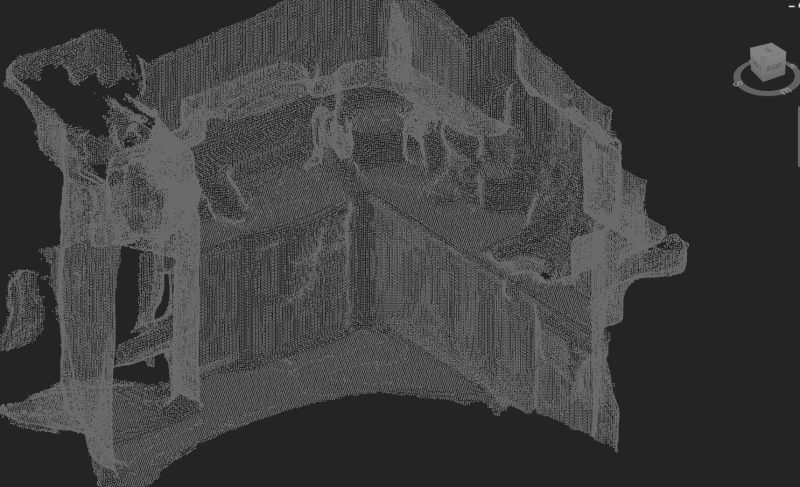
Point Cloud in Revit:
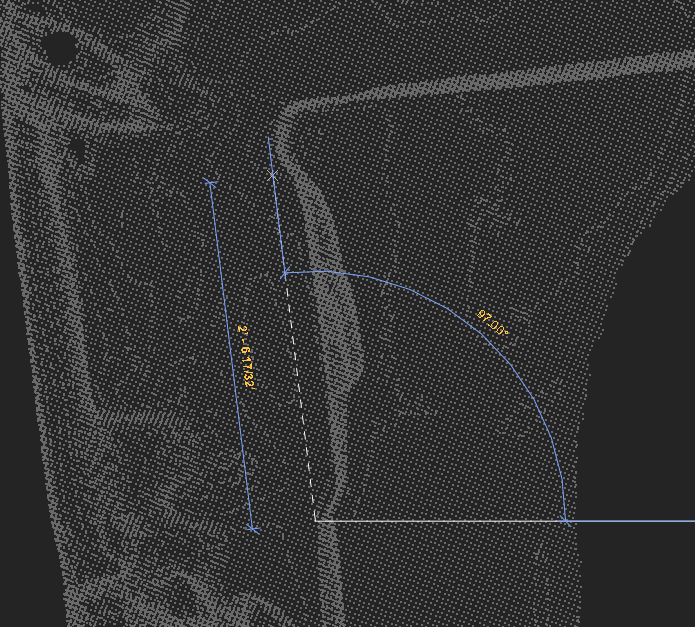
Oven Dimension in Revit (actual 2'- 5 13/16", so again super rough but useful for context)
So not nearly as accurate as those multi thousand dollar scanners but to get a rough scan for context and rough location of obstruction could be pretty useful.
Phone: iPhone 12 Pro (Looks like the Max and the newest iPad pro also have the lidar sensors)
Phone App: 3D Scanner App (free and can export to OBJ files as well as others) Link
My Personal Open Source Structural Applications:
Open Source Structural GitHub Group:
I recently got a much needed cell phone upgrade and found myself with a phone that has a lidar sensor along with the cameras.
The sensor is terrible for fine detail but for big dimensions like wall to wall distance it gets passable results and gives me a way to do some cheap 3D scans on the quick for context when back in the office.
It took a bit to find a process to make usable output for Revit but found two paths:
First off here is what the raw exported obj file looks like, it's pretty muddy (fine detail is lost but big stuff like the width of my oven and height of my countertop are ok)
Path 1:
Use MeshLab to export a dxf file, this DXF is the 3D Mesh (you may want to do some mesh simplifications prior to exporting)
Link to Meshlab: Link
In Revit under the Massing and Site tab model an in place Mass and import the DXF to the Mass
(it needs to be brought into a Mass otherwise floor cut planes and sections won't clip the mesh)
Mesh DXF in Revit:
Section thru counter/floor (actual tape measure 2'- 10 3/4"):
Path 2:
Using the following python code pull out the vertices from the OBJ file and write an .XYZ point cloud file:
Python:
"""
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
SOFTWARE.
"""
'this script file must be in the same path as the obj file'
f = open("export.obj", "r")
lines_raw = f.readlines()
f.close()
points = []
for line in lines_raw:
if line[0] == "v":
points.append(line[2:])
else:
pass
'writes out an xyz file to the same file path as the script'
file = open('export.xyz','w')
for pt in points:
file.write(pt)
file.close()Using the Free Trial Version of Autodesk Recap (ability to save project .rcp appears to persist after trial ends) import the .xyz file and index with Recap to a .rcp file (for the app I use to export up is y not z)
Link to Autodesk Recap: Link
In Revit import a point cloud and pick the RCP file.
Point Cloud in Revit:
Oven Dimension in Revit (actual 2'- 5 13/16", so again super rough but useful for context)
So not nearly as accurate as those multi thousand dollar scanners but to get a rough scan for context and rough location of obstruction could be pretty useful.
Phone: iPhone 12 Pro (Looks like the Max and the newest iPad pro also have the lidar sensors)
Phone App: 3D Scanner App (free and can export to OBJ files as well as others) Link
My Personal Open Source Structural Applications:
Open Source Structural GitHub Group: