Dear community,
I am planing to use friction wheels on my current design but before starting the selection of the elements, I was reading a little bit about them. I found online the following information:
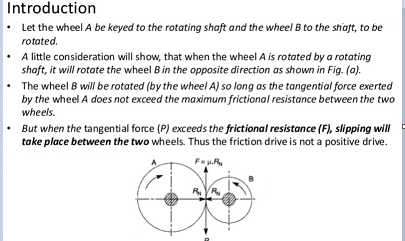
I would like to ask if you agree with the statement of the last bullet point. In my opinion, P>F is the required condition to initiate the movement of the wheels, nevertheless, the author claims that this is the condition for slipping.
I can imagine that there is a flaw in my reasoning but I cannot identify it.
Thank you for your time!
I am planing to use friction wheels on my current design but before starting the selection of the elements, I was reading a little bit about them. I found online the following information:
I would like to ask if you agree with the statement of the last bullet point. In my opinion, P>F is the required condition to initiate the movement of the wheels, nevertheless, the author claims that this is the condition for slipping.
I can imagine that there is a flaw in my reasoning but I cannot identify it.
Thank you for your time!