Waseem Akram
Computer
Hello everyone!
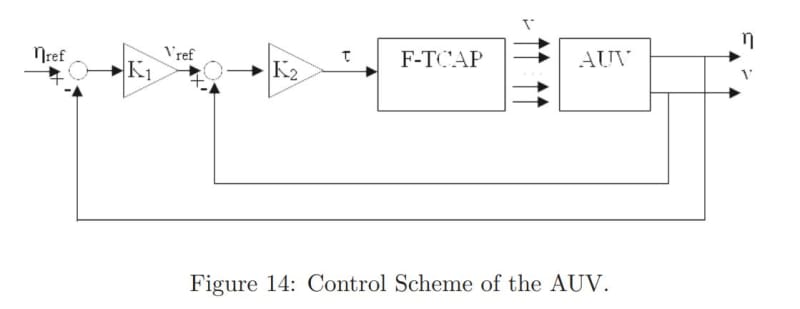
I need guidance in designing a virtual control law for path following using AUV model. The control law is attached in the figure. The code is not working (attached). I don't understand how to fix it. Could anybody help me?
I need guidance in designing a virtual control law for path following using AUV model. The control law is attached in the figure. The code is not working (attached). I don't understand how to fix it. Could anybody help me?
") ,end);
,end);