-
1
- #1
Hi,
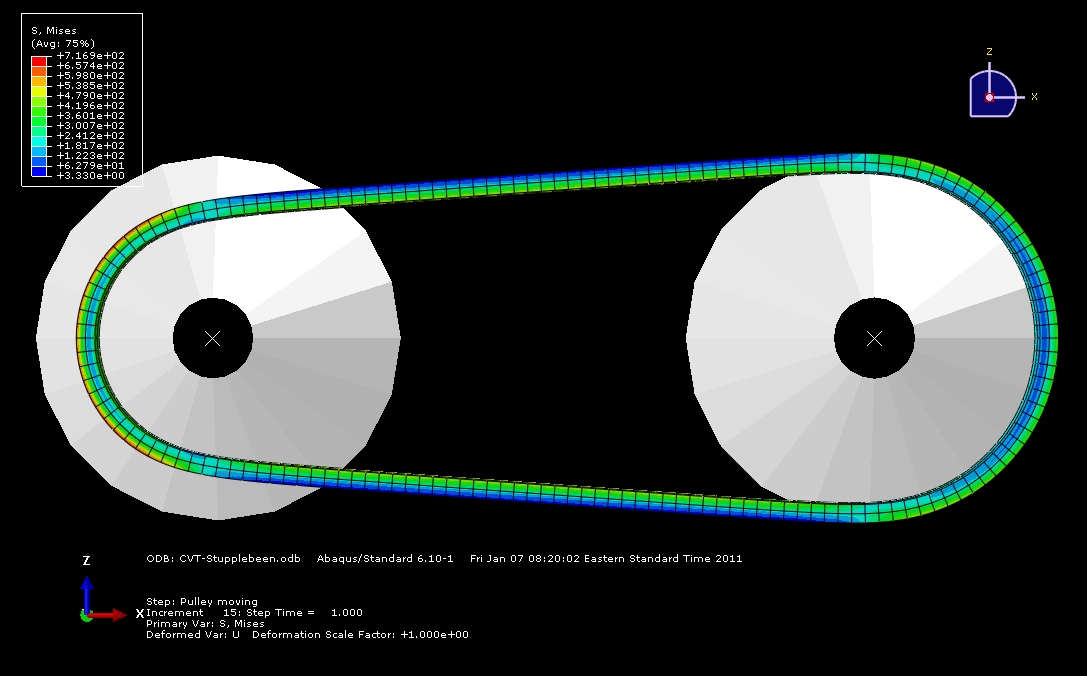
I'm trying to learn abaqus because I want to simulate en CVT system with it. After a lot of trying a got finally me model in the starting position. I made a belt which is clamped between 2 sets of poulies. When I'm turning one of the poulies, abaqus runs into simulation problems (to small increments).
I have already tried finer mesh and added some damping to the step. The last one seems to help, only then my poulie goes trough the belt. Also with damping after a while it also stops simulating. I've already changed a lot of parameters but it don't work.
Is there anyone who can give me a push in the right direction?
I've added the file as attachment.
I'm trying to learn abaqus because I want to simulate en CVT system with it. After a lot of trying a got finally me model in the starting position. I made a belt which is clamped between 2 sets of poulies. When I'm turning one of the poulies, abaqus runs into simulation problems (to small increments).
I have already tried finer mesh and added some damping to the step. The last one seems to help, only then my poulie goes trough the belt. Also with damping after a while it also stops simulating. I've already changed a lot of parameters but it don't work.
Is there anyone who can give me a push in the right direction?
I've added the file as attachment.