fracture_point
Structural
Hi all,
Hoping you can offer me some guidance/point me in the right direction with resources to my current problem.
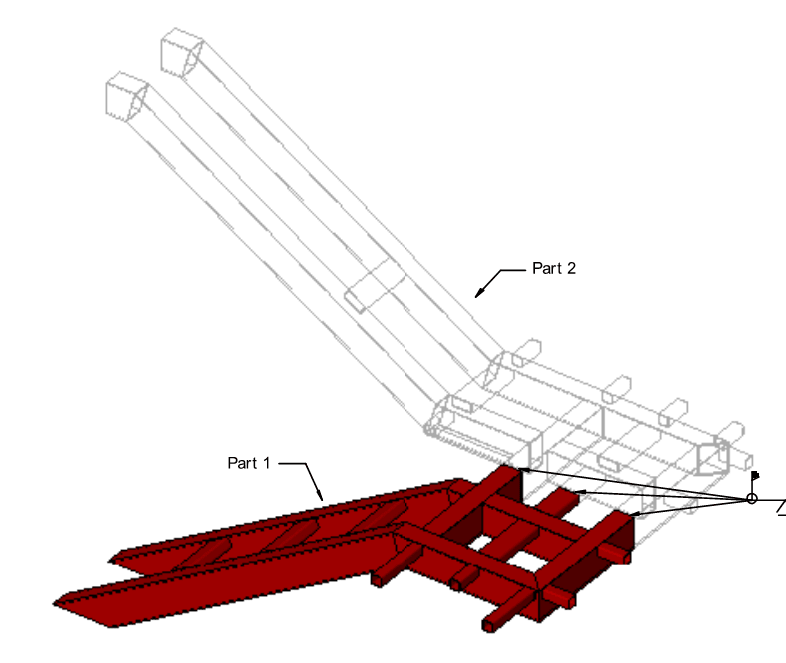
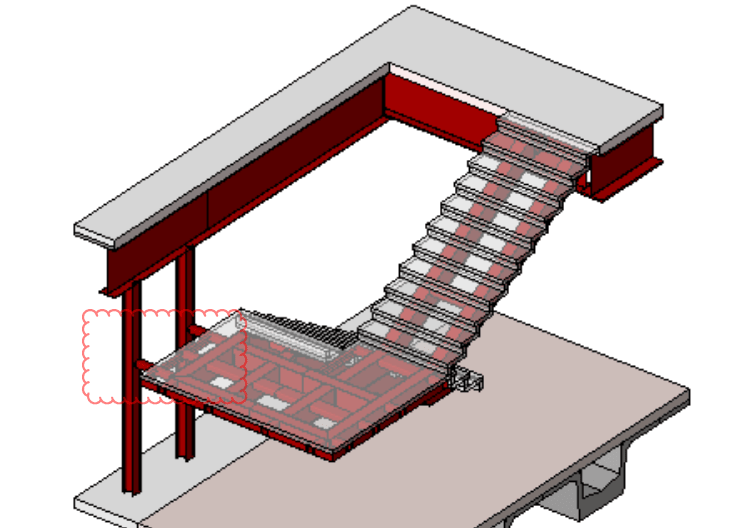
The architect wants a staircase that is cantilevered from the main structure suspended into an atrium space (see attached paint diagram). It is likely these moment connections will have to come from embedding the stringers some distance into the floor slab to provide full rotational restraint (moment capacity).
This is a high seismic zone and the structure is very stiff and therefore falls within the peak response of accelerations. I have a couple of concerns:
1) Vibration of the floors. I believe I can find plenty of guidance on this in published work.
2) The stairs are rigidly connected to the structure. Therefore, when the structure moves the stairs will too and this will induce seismic forces in the stairs. There is not any redundancy in this system, so in my eyes it is critical for this structure not to develop plasticity at the moment connection as this will cause instability due to no restraint against rotation. I cannot find any resources on determining the seismic load to design this system of stairs for.
Is it necessary to complete a modal analysis of the stairs also? I suspect that the stairs have some flexible modes in the Z-axis due to their cantilevered nature.
Thanks in advance.
Hoping you can offer me some guidance/point me in the right direction with resources to my current problem.
The architect wants a staircase that is cantilevered from the main structure suspended into an atrium space (see attached paint diagram). It is likely these moment connections will have to come from embedding the stringers some distance into the floor slab to provide full rotational restraint (moment capacity).
This is a high seismic zone and the structure is very stiff and therefore falls within the peak response of accelerations. I have a couple of concerns:
1) Vibration of the floors. I believe I can find plenty of guidance on this in published work.
2) The stairs are rigidly connected to the structure. Therefore, when the structure moves the stairs will too and this will induce seismic forces in the stairs. There is not any redundancy in this system, so in my eyes it is critical for this structure not to develop plasticity at the moment connection as this will cause instability due to no restraint against rotation. I cannot find any resources on determining the seismic load to design this system of stairs for.
Is it necessary to complete a modal analysis of the stairs also? I suspect that the stairs have some flexible modes in the Z-axis due to their cantilevered nature.
Thanks in advance.