Induction motors work on alternating current.
AC devices depend on the presence of some frequency of AC to operate.
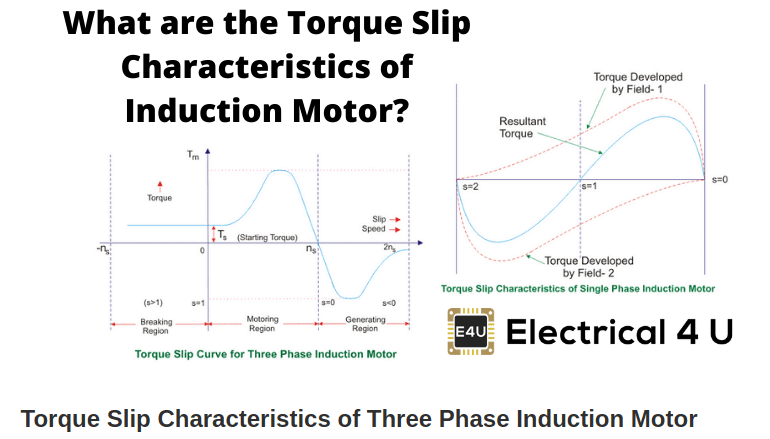
The generation of magnetic flux in an induction motor's rotor depends upon the difference in speed between the rotating magnetic field generated in the stator windings and the rotor itself, meaning that at the instant of start-up from rest the squirrel cage will, by transformer action, have an AC current induced in it identical to the frequency of the AC supply from the mains.
In the case of starting a motor not connected to any mechanical load, the frequency of the rotor AC will drop as the speed of the motor rises.
Once the motor reaches its idling, barely sub-synchronous no-load speed, the current generated in the rotor's squirrel cage bars will be alternating current with a frequency that will be a fraction of one Hertz, which some sources describe as a quasi-DC current. The rotor speed curve will be asymptotic, since by definition the closer to synchronous speed the rotor speed becomes the less transformer action there will be to induce a magnetic field in the rotor; if the motor in question were coupled to a DC machine that could supply rotative power to it, it would be possible to increase the speed of the AC motor so that the frequency in the rotor would become zero and the motor itself would generate zero torque.
Indeed if at this point more rotative power was supplied to the AC induction motor, driving it into super-synchronous territory, it would begin to function as an induction generator.
Read your textbooks, and if they don't explain all this, find other ones.
CR
"As iron sharpens iron, so one person sharpens another." [Proverbs 27:17, NIV]