Hello there!
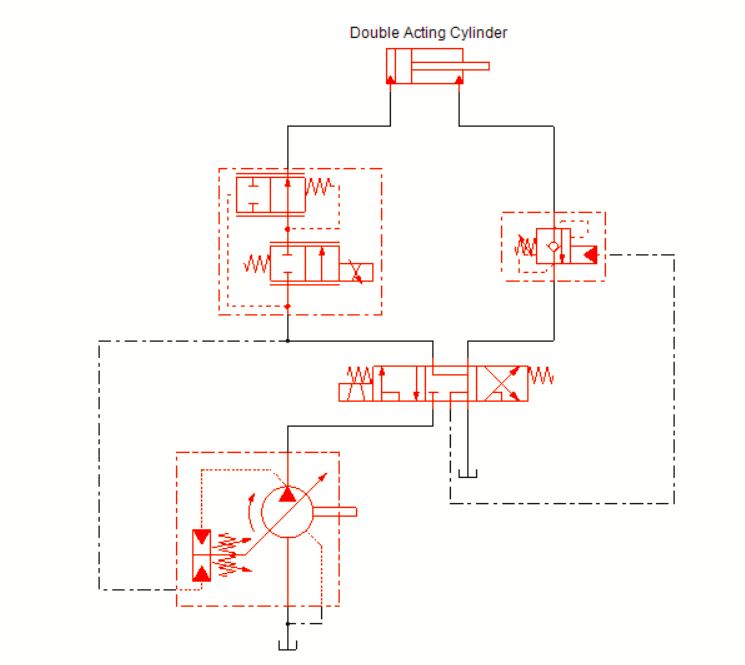
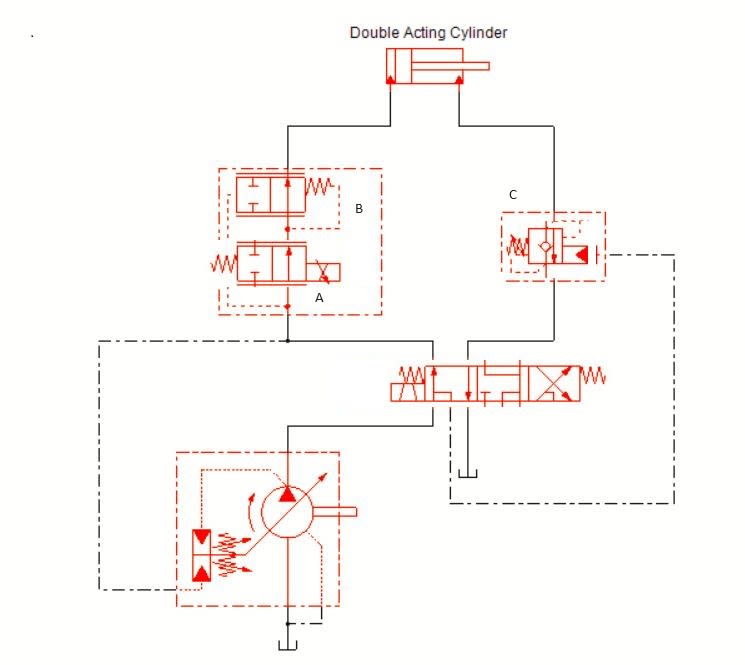
I am designing a boom for load pickup, which also has to rotate. And one of the requirements is to reduce the speed of extension and rotation of the boom at the end of the ligting. What I mean by this. For the first 30 seconds, the boom has to lift at a speed of 0.3 m/s, and for the last 10 seconds, the lift speed has to be 0.03 m/s. I'm not very familiar with hydraulics, I'm just starting to learn it. So far I have realized that I need to use a hydraulic proportional valve and adjustable axial piston pump. I understand a little bit about l-s control when the pump changes pressure if the load on the boom changes. But I can't figure out how to forcibly change the boom extension speed when the boom load is unchanged. Could you please advise me in which direction to look and what equipment to pay attention to? And also how it can be organized.
Thank you!
I am designing a boom for load pickup, which also has to rotate. And one of the requirements is to reduce the speed of extension and rotation of the boom at the end of the ligting. What I mean by this. For the first 30 seconds, the boom has to lift at a speed of 0.3 m/s, and for the last 10 seconds, the lift speed has to be 0.03 m/s. I'm not very familiar with hydraulics, I'm just starting to learn it. So far I have realized that I need to use a hydraulic proportional valve and adjustable axial piston pump. I understand a little bit about l-s control when the pump changes pressure if the load on the boom changes. But I can't figure out how to forcibly change the boom extension speed when the boom load is unchanged. Could you please advise me in which direction to look and what equipment to pay attention to? And also how it can be organized.
Thank you!