EngRepair
Electrical
- Oct 13, 2012
- 49
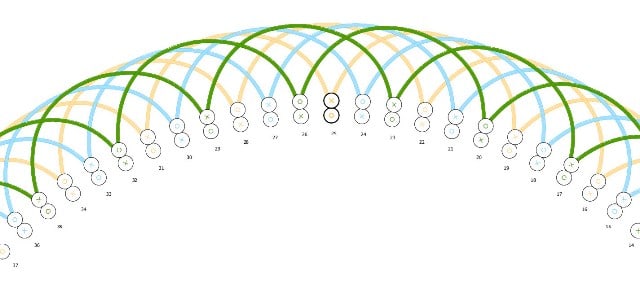
Does anyone else see something very strange in this unusual diagram?
It is a three-phase, double-layer 32-pole motor winding with 96 slots.
Is this connection correct?
If so, are there any benefits?

It is a three-phase, double-layer 32-pole motor winding with 96 slots.
Is this connection correct?
If so, are there any benefits?