Hi,
I have a curved deformable plate that I wish to flatten using 2x flat plates (1 at the top and 1 at the bottom). My question is, do I choose those 2x flat plates as a discrete or analytical rigid model? In terms of the contact property, I imagine it will be a surface-to-surface contact with penalty and hand contact method? Also, I am slightly lost with the constraints - do you tie top plate to the curved plate and again the curved plate to the bottom plate? Of course in both cases, the 2x flats will be masters and curved will be the slave respectively. Please let me know if more info is needed. Cheers
Example model:
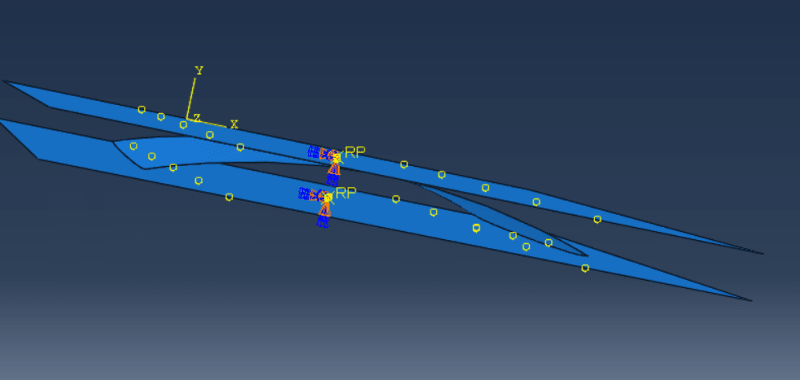
I have a curved deformable plate that I wish to flatten using 2x flat plates (1 at the top and 1 at the bottom). My question is, do I choose those 2x flat plates as a discrete or analytical rigid model? In terms of the contact property, I imagine it will be a surface-to-surface contact with penalty and hand contact method? Also, I am slightly lost with the constraints - do you tie top plate to the curved plate and again the curved plate to the bottom plate? Of course in both cases, the 2x flats will be masters and curved will be the slave respectively. Please let me know if more info is needed. Cheers
Example model: