Atilano1
New member
- Mar 21, 2023
- 5
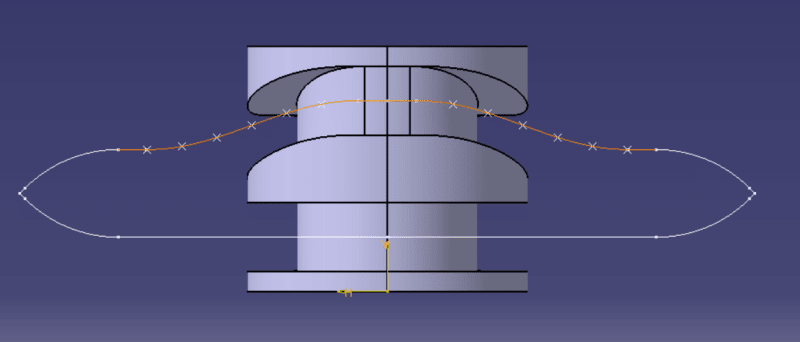
Good evening. I was looking for someone that could tell me how can I simulate an engine valve opening but it is activated thought a follower instead of a cam. And the follower is not in constant contact with the valve as the cam.
I will leave an image of the engine design. If someone thinks that can help me or if wants to now more details of the issue, feel free to reply.
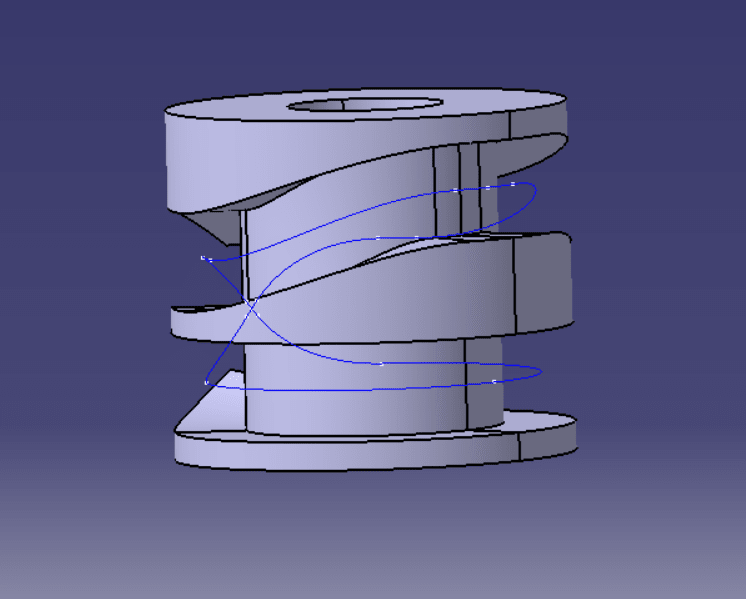
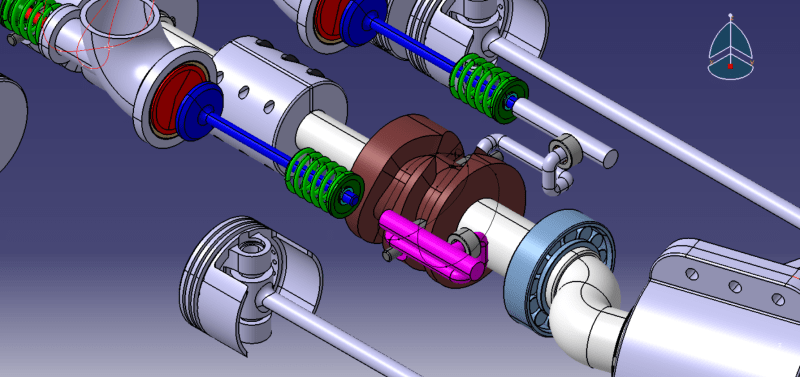
In this case I want to open the blue valve of the image using the pink follower that only has translational movement in one direction. The follower moves trought a cam follower that is connected to a cylindrical cam painted as brown. The all engine works perfectly and the only joint left for the movement to be completed is the valve opening.
I will leave an image of the engine design. If someone thinks that can help me or if wants to now more details of the issue, feel free to reply.
In this case I want to open the blue valve of the image using the pink follower that only has translational movement in one direction. The follower moves trought a cam follower that is connected to a cylindrical cam painted as brown. The all engine works perfectly and the only joint left for the movement to be completed is the valve opening.