Afternoon,
I don't have a great deal of experience in mechanisms and clamping so was after some help/ advice.
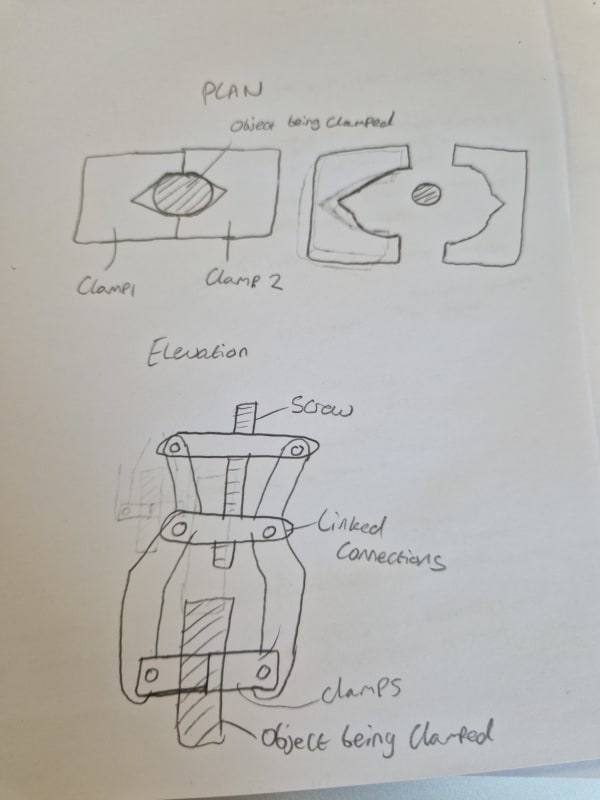
Could anyone help me with this problem attached. I am struggling to understand how to analyse the clamping force required.
The bar to be clamped is 7kg and 10mm in diameter and it must be lifted whilst clamped (cresting 69N force acting downwards)
I have made a concept and need to determine the clamping forces required but
It follows the same clamping mechanism as this:
I assume the reactive force from linkage bar it's attached to can be determined through force vectors.
Any advice on how to analyse this would be very helpful
Many thanks
I don't have a great deal of experience in mechanisms and clamping so was after some help/ advice.
Could anyone help me with this problem attached. I am struggling to understand how to analyse the clamping force required.
The bar to be clamped is 7kg and 10mm in diameter and it must be lifted whilst clamped (cresting 69N force acting downwards)
I have made a concept and need to determine the clamping forces required but
It follows the same clamping mechanism as this:
I assume the reactive force from linkage bar it's attached to can be determined through force vectors.
Any advice on how to analyse this would be very helpful
Many thanks