hi
I have been trying to run a co-simulation that consists of a hydraulic suspension being implemented on an Adams/car convertible model that has been tuned …
I have tried to make the Longitudinal Velocity of the vehicle Constant so I can have a steady-state test condition and I succeeded to do that in Adams/car by the use of the PID controller in Event Builder .
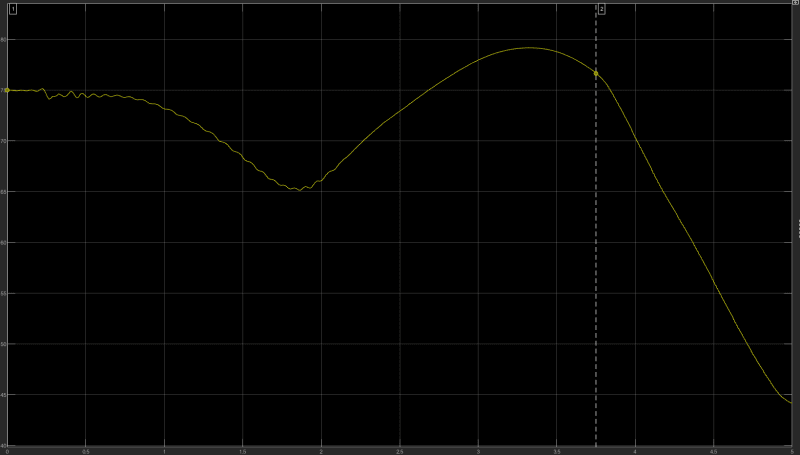
but when I run a co-simulation in Simulink/MATLAB the longitudinal velocity acts like this :
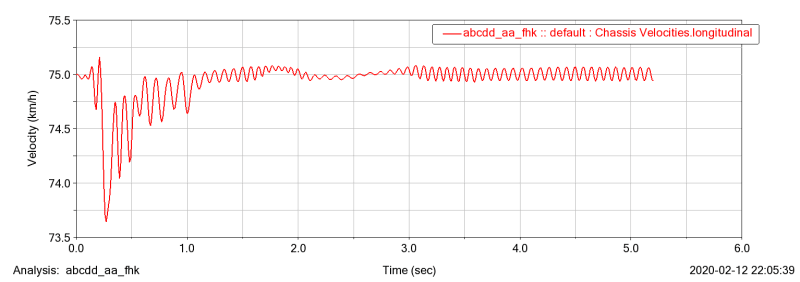
however it works like this in Adams/car itself :
what do you think i'm doing wrong ? or is it not possible to create a constant longitudinal velocity when i transfer it to MATLAB ?
mind you , the other results are almost right and identical … like roll angle and roll rate ...
thanks
I have been trying to run a co-simulation that consists of a hydraulic suspension being implemented on an Adams/car convertible model that has been tuned …
I have tried to make the Longitudinal Velocity of the vehicle Constant so I can have a steady-state test condition and I succeeded to do that in Adams/car by the use of the PID controller in Event Builder .
but when I run a co-simulation in Simulink/MATLAB the longitudinal velocity acts like this :
however it works like this in Adams/car itself :
what do you think i'm doing wrong ? or is it not possible to create a constant longitudinal velocity when i transfer it to MATLAB ?
mind you , the other results are almost right and identical … like roll angle and roll rate ...
thanks