I've been analyzing a vehicle and the Full vehicle analysis>Vehicle Set Up > Powertrain isn't active or it is hidden ...
in the J-Turn Test , I've been trying to make the longitudinal velocity constant during the j-turn manoeuvre ...
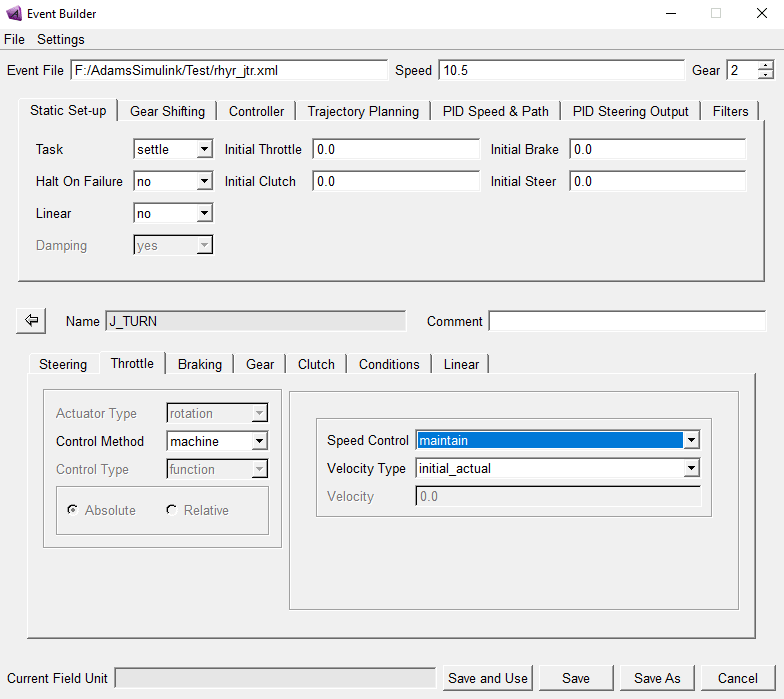
what i did was to make that happen by means of Event Builder ... but it doesn't happen exactly as it should ...
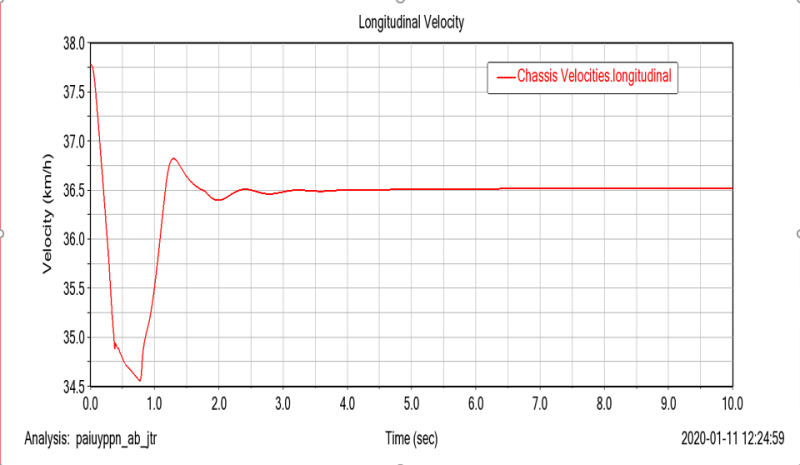
i chose the 10.5 m/s velocity as the longitudinal velocity but as you can see the vehicle's velocity does two things :
1- it lowers by a sudden wave from the velocity that it has been defined in Event Builder
2- i can't raise the longitudinal velocity because for one thing it gives an error as to the vehicle either rolls over or spins around or gives a halt error that stops the test , for another thing , no matter what the steering angle is , the longitudinal velocity cannot go beyond 10.5 m/s or it gives the same error which i think it's really odd and wrong and i'm almost sure that it's because of a software thing or the model issue or something else ...
the error is this :
---- START: ERROR ----
At time 2.990053083E+00 the integrator is unable to proceed. Possible Causes:
(1) The accuracy required for the numerical solution can not be attained.
Relax (increase) the value of the acceptable integration ERROR.
(2) Incompatible redundant constraints, a lock up, or a bifurcation
situation. The latter two indicate a mechanism design problem.
(3) The system includes a zero (or relatively small) mass on a part with
an unconstrained translational degree of freedom.
Make sure you have mass on all parts with translational degrees of freedom.
(4) The system includes a zero (or relatively small) inertia on a part
with an unconstrained rotational degree of freedom.
Make sure you have inertias on all parts with rotational degrees of freedom.
(5) An Adams element has a function expression that equals exactly itself.
For example,
SFORCE/id1,I=id2,J=id3,ROT,FUNC=SFORCE(id1,jflag,comp,rm),and
DIFF/id4,IMPLICIT,IC=0,FUNC=DIF1(id4).
Similarly,
VARIABLE/id5, FUNC=VARVAL(id5)*TIME
equals itself at 1 second. Avoid setting an Adams element equal to itself.
---- END: ERROR ----
Dynamic Solution stopped.
End Simulation
Simulate status=-124
---- START: ERROR ----
SIMULATE command failed for minimaneuver: J_TURN
Aborting Execution.
---- END: ERROR ----
as you know in the j-turn manoeuvre , the longitudinal velocity goes down during the j-turn mini-manoeuvre ... so if you want to do a steady-state test you have to fiddle with the Event Builder or the Engine Braking Torque or other resistance forces that make the vehicle's velocity go down ...
mind you , in the event builder i put the throttle option on the machine and maintain velocity and also in the static set up i change the task from straight to settle because the straight makes the velocity to change with unbalanced oscillations around the defined velocity during the test :
the mini-baja model is at :
appreciate your help in this ...
in the J-Turn Test , I've been trying to make the longitudinal velocity constant during the j-turn manoeuvre ...
what i did was to make that happen by means of Event Builder ... but it doesn't happen exactly as it should ...
i chose the 10.5 m/s velocity as the longitudinal velocity but as you can see the vehicle's velocity does two things :
1- it lowers by a sudden wave from the velocity that it has been defined in Event Builder
2- i can't raise the longitudinal velocity because for one thing it gives an error as to the vehicle either rolls over or spins around or gives a halt error that stops the test , for another thing , no matter what the steering angle is , the longitudinal velocity cannot go beyond 10.5 m/s or it gives the same error which i think it's really odd and wrong and i'm almost sure that it's because of a software thing or the model issue or something else ...
the error is this :
---- START: ERROR ----
At time 2.990053083E+00 the integrator is unable to proceed. Possible Causes:
(1) The accuracy required for the numerical solution can not be attained.
Relax (increase) the value of the acceptable integration ERROR.
(2) Incompatible redundant constraints, a lock up, or a bifurcation
situation. The latter two indicate a mechanism design problem.
(3) The system includes a zero (or relatively small) mass on a part with
an unconstrained translational degree of freedom.
Make sure you have mass on all parts with translational degrees of freedom.
(4) The system includes a zero (or relatively small) inertia on a part
with an unconstrained rotational degree of freedom.
Make sure you have inertias on all parts with rotational degrees of freedom.
(5) An Adams element has a function expression that equals exactly itself.
For example,
SFORCE/id1,I=id2,J=id3,ROT,FUNC=SFORCE(id1,jflag,comp,rm),and
DIFF/id4,IMPLICIT,IC=0,FUNC=DIF1(id4).
Similarly,
VARIABLE/id5, FUNC=VARVAL(id5)*TIME
equals itself at 1 second. Avoid setting an Adams element equal to itself.
---- END: ERROR ----
Dynamic Solution stopped.
End Simulation
Simulate status=-124
---- START: ERROR ----
SIMULATE command failed for minimaneuver: J_TURN
Aborting Execution.
---- END: ERROR ----
as you know in the j-turn manoeuvre , the longitudinal velocity goes down during the j-turn mini-manoeuvre ... so if you want to do a steady-state test you have to fiddle with the Event Builder or the Engine Braking Torque or other resistance forces that make the vehicle's velocity go down ...
mind you , in the event builder i put the throttle option on the machine and maintain velocity and also in the static set up i change the task from straight to settle because the straight makes the velocity to change with unbalanced oscillations around the defined velocity during the test :
the mini-baja model is at :
appreciate your help in this ...