Dear All
We are facing problem of Coupling Failure on an Electric Motor Drive Centrifugal Compressor Train. The layout is as follows
Motor - Gear Box - LP Compressor - HP Compressor
The Motor is Squirrel Cage type 3 Phase Induction Motor (2 Pole, 2967 RPM, 50 Hz) started Direct On Line. As per Motor Curves, Motor can develop Peak Torque equal to 2.5 times Full Load Torque during Startup.
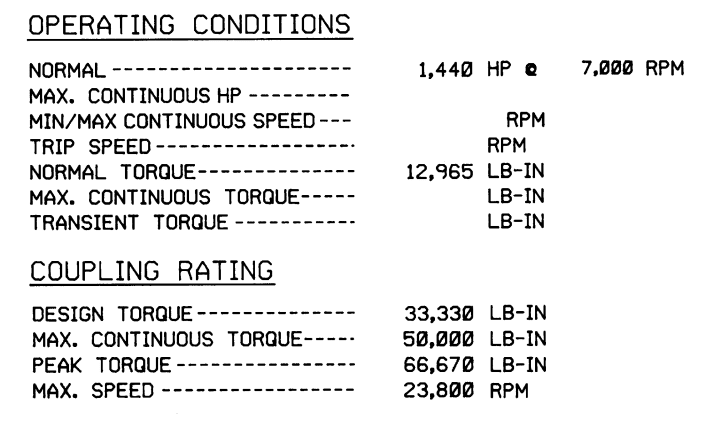
The Service Factor (Ratio of Max. Continuous Torque to Normal Torque) is 3.06 for Motor to Gear Box Coupling whereas this value is 2.16 for Gear Box to LP Compressor Coupling and 1.82 for LP to HP Coupling.
Ratio of Peak Torque Rating to Normal Torque for Gear Box to LP & LP to HP Coupling is 2.89 & 2.47 respectively.
Appreciate if anyone please help to understand the following
If Motor actually develops Peak Torque equal to 2.5 Times Full Load Torque during startup, Torque transmitted by Gear Box to LP and LP to HP Coupling will be increased by same factor of 2.5 ? and if so this implies G-Box to LP & LP to HP Couplings will fail after certain number of Start Stops as Couplings are designed to withstand Peak Torque for limited number of Cycles?
We are facing problem of Coupling Failure on an Electric Motor Drive Centrifugal Compressor Train. The layout is as follows
Motor - Gear Box - LP Compressor - HP Compressor
The Motor is Squirrel Cage type 3 Phase Induction Motor (2 Pole, 2967 RPM, 50 Hz) started Direct On Line. As per Motor Curves, Motor can develop Peak Torque equal to 2.5 times Full Load Torque during Startup.
The Service Factor (Ratio of Max. Continuous Torque to Normal Torque) is 3.06 for Motor to Gear Box Coupling whereas this value is 2.16 for Gear Box to LP Compressor Coupling and 1.82 for LP to HP Coupling.
Ratio of Peak Torque Rating to Normal Torque for Gear Box to LP & LP to HP Coupling is 2.89 & 2.47 respectively.
Appreciate if anyone please help to understand the following
If Motor actually develops Peak Torque equal to 2.5 Times Full Load Torque during startup, Torque transmitted by Gear Box to LP and LP to HP Coupling will be increased by same factor of 2.5 ? and if so this implies G-Box to LP & LP to HP Couplings will fail after certain number of Start Stops as Couplings are designed to withstand Peak Torque for limited number of Cycles?