zaraf1
Automotive
- Mar 18, 2018
- 8
Dear community,
For one of the projects which I am currently working on, I want to quantify my three phase AC induction motor in the following ways:
1. Find Torque vs RPM Curve
2.Find Efficiency vs RPM Curve
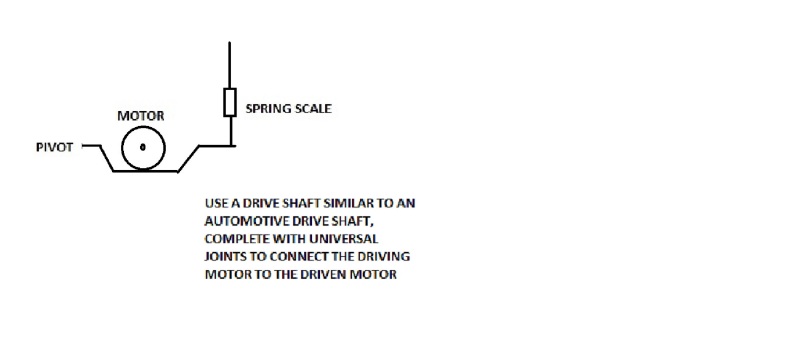
Now since I dont have the industrial "Torque Sensor" to plot Torque vs RPM curves, I thought I could proceed the following way. Luckily I have two same motors") :
:
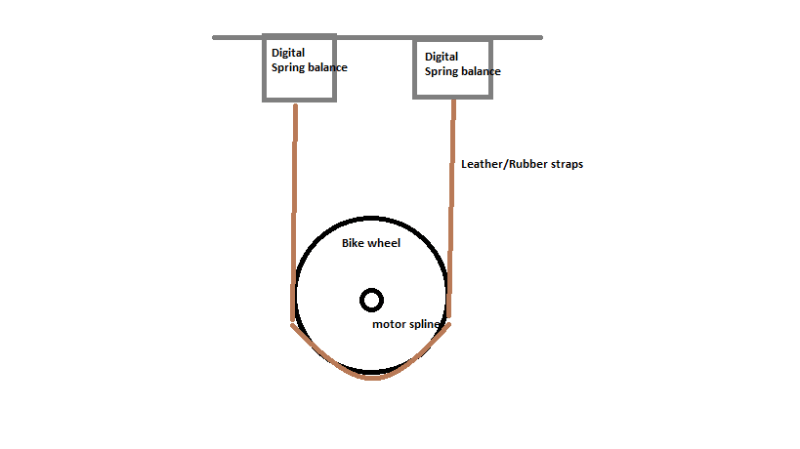
So I take the first motor and make it a drive. Then I take the second motor and make it function like a load. The two motors shall be coupled on the shaft. After that I want to rotate the drive motor uptil 100 RPM with load motor being idle. Slowly the load motor is powered up. In response the drive motor would also enhance it's power by drawing more current. Due to this the RPM shall stay constant all the time. At one point increasing load would start decreasing the rpm. Now shortly before this point the max power required to maintain the "constant rpm" will be calculated. This will be done using:
Power input = Mean of three phase currents x Voltage x PF
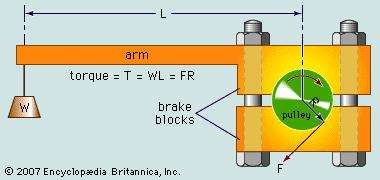
Using this value of the Power, torque for this particular RPM will be calculated using Power=TorquexRPM
The procedure will be repeated for increasing RPMs like 100, 200, 300 etc and then a plot of Torque vs RPM be plotted.
Now this will be an approximation because the mechanical output of motor is factored by efficiency which we dont have.
Do you think that this experiment is making sense?
Regards
Zaraf
For one of the projects which I am currently working on, I want to quantify my three phase AC induction motor in the following ways:
1. Find Torque vs RPM Curve
2.Find Efficiency vs RPM Curve
Now since I dont have the industrial "Torque Sensor" to plot Torque vs RPM curves, I thought I could proceed the following way. Luckily I have two same motors
:So I take the first motor and make it a drive. Then I take the second motor and make it function like a load. The two motors shall be coupled on the shaft. After that I want to rotate the drive motor uptil 100 RPM with load motor being idle. Slowly the load motor is powered up. In response the drive motor would also enhance it's power by drawing more current. Due to this the RPM shall stay constant all the time. At one point increasing load would start decreasing the rpm. Now shortly before this point the max power required to maintain the "constant rpm" will be calculated. This will be done using:
Power input = Mean of three phase currents x Voltage x PF
Using this value of the Power, torque for this particular RPM will be calculated using Power=TorquexRPM
The procedure will be repeated for increasing RPMs like 100, 200, 300 etc and then a plot of Torque vs RPM be plotted.
Now this will be an approximation because the mechanical output of motor is factored by efficiency which we dont have.
Do you think that this experiment is making sense?
Regards
Zaraf