kellez
Civil/Environmental
- Nov 5, 2011
- 276
I am designing a one-storey RC house, the foundation is a raft foundation 45cm thick, with foundation beams (45cm height) (fully embedded inside the raft) interconnecting the frame columns.
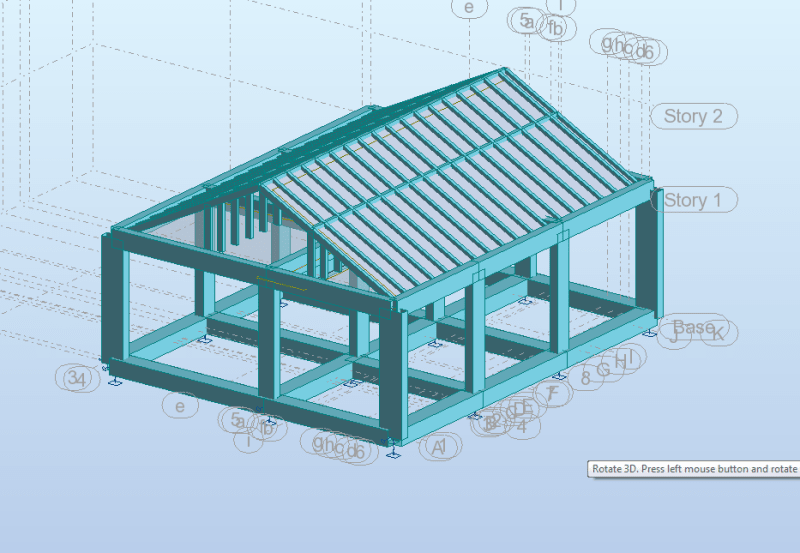
1. The superstructure was designed with fully fixed supports at column bases but the foundation beams will be designed with winkler beams at column supports.
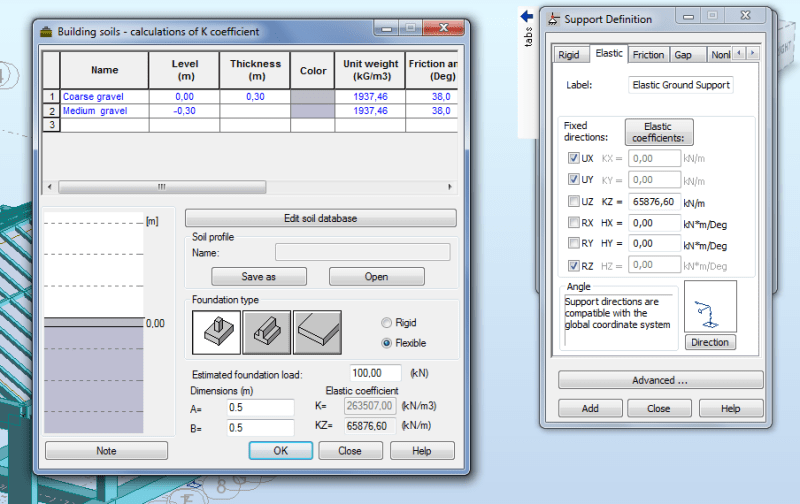
Support definition at column bases is:
UX - fixed
UY - fixed
UZ - spring with stiffness - RELEASED
RX - spring with stiffness - RELEASED
RY - spring with stiffness - RELEASED
RX - fixed
So now how do i choose the stiffness value for the 3 releases?
1. The superstructure was designed with fully fixed supports at column bases but the foundation beams will be designed with winkler beams at column supports.
Support definition at column bases is:
UX - fixed
UY - fixed
UZ - spring with stiffness - RELEASED
RX - spring with stiffness - RELEASED
RY - spring with stiffness - RELEASED
RX - fixed
So now how do i choose the stiffness value for the 3 releases?