prakhar5aug
Automotive
- Jul 19, 2014
- 28
Hello,
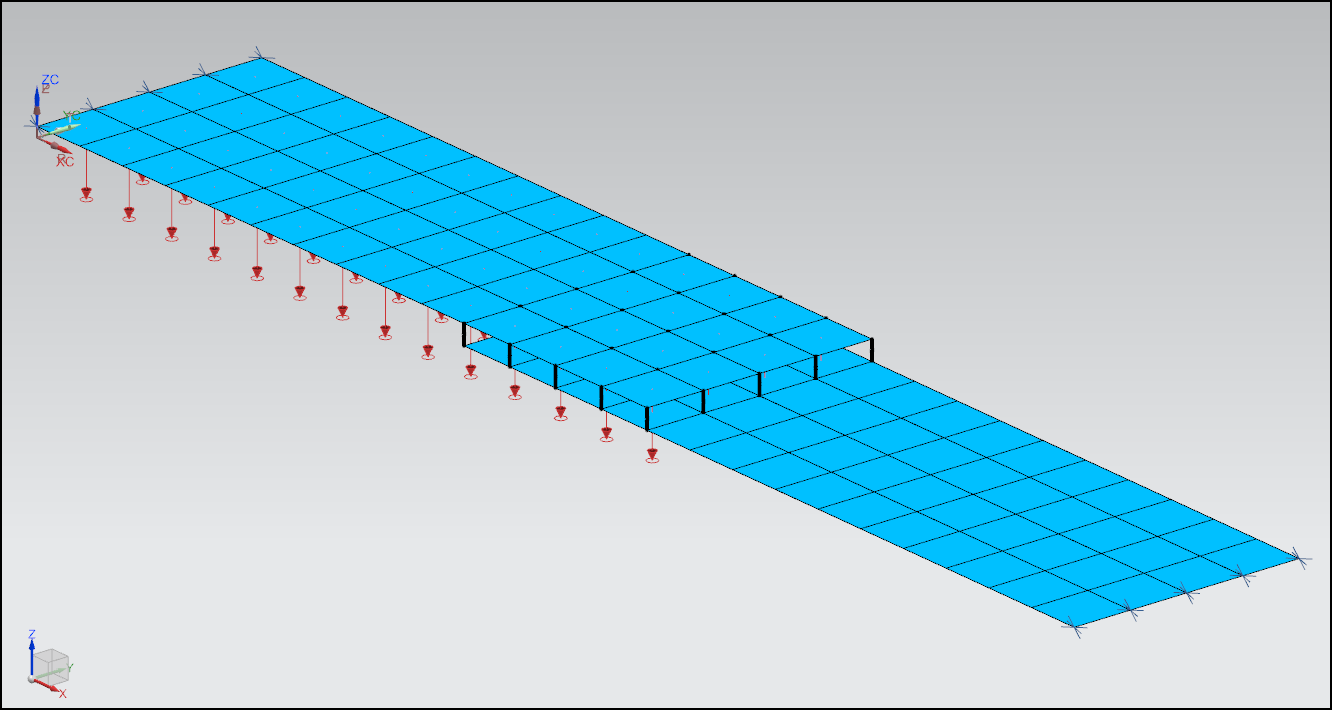
I am modelling a simple structure with two sheets which are about 20mm apart both are fixed, force is applied on the lower sheet in upward direction such that it bends and then touches the upper sheet....
I have applied both surface to surface contact mesh from FEM environment and surface contact from SIM environment but in both cases before lower sheet is bended just half the distance (8-12mm) the upper sheet starts to bend.... i.e. they are apart but still they behave as if touched....
and if does not apply anything the sheet just pass through each other....is there any waw to tell NX that there is sheet do not cross it....
Kindly suggest some ways to model the same...
Thanks & Regards,
Prakhar Gupta
I am modelling a simple structure with two sheets which are about 20mm apart both are fixed, force is applied on the lower sheet in upward direction such that it bends and then touches the upper sheet....
I have applied both surface to surface contact mesh from FEM environment and surface contact from SIM environment but in both cases before lower sheet is bended just half the distance (8-12mm) the upper sheet starts to bend.... i.e. they are apart but still they behave as if touched....
and if does not apply anything the sheet just pass through each other....is there any waw to tell NX that there is sheet do not cross it....
Kindly suggest some ways to model the same...
Thanks & Regards,
Prakhar Gupta