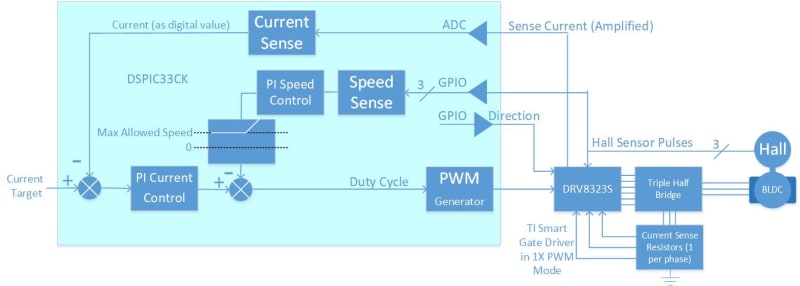
My goal is to drive a BLDC motor that provides a propulsion power assist that supplements the push force effort required from a user attempting to move a cart. The input command comes from a force sensor in the handles used to push the cart. The control loop includes torque (current) control but with a limit on the cart's ultimate speed.
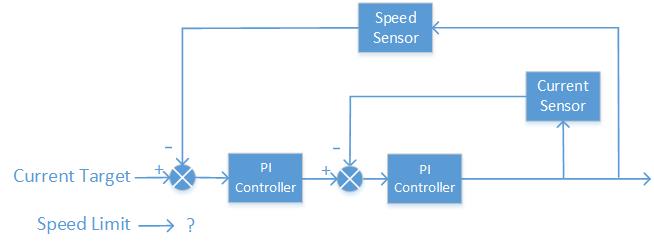
The control scheme that appears to be most common for two variable loops uses cascaded control architecture. As you can see from the diagram below, I can't figure out how to include the speed limiting function in a cascaded loop architecture. This diagram illustrates where I'm stuck.
It may help to know that I am trying to instruct my software engineer in how to write C coded firmware for a microchip MCU to perform this function. Any help that can be provided would be appreciated.
-Keith
The control scheme that appears to be most common for two variable loops uses cascaded control architecture. As you can see from the diagram below, I can't figure out how to include the speed limiting function in a cascaded loop architecture. This diagram illustrates where I'm stuck.
It may help to know that I am trying to instruct my software engineer in how to write C coded firmware for a microchip MCU to perform this function. Any help that can be provided would be appreciated.
-Keith