Dear All
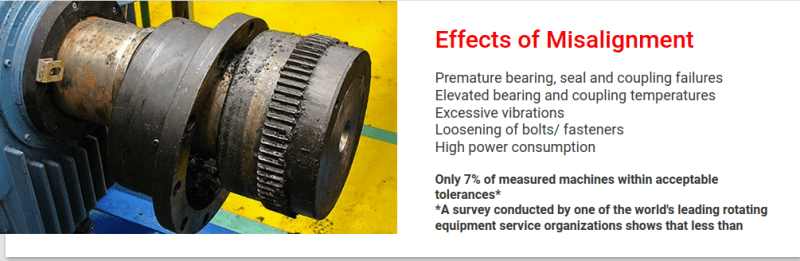
We are facing problem of repeated Coupling Failures on a Centrifugal Compressor Train driven by a 2967 RPM, 2 pole, 3 phase, 50 Hz Squirrel Cage Induction Motor.
Attached is the Screenshot of Motor Curves showing Motor can develop up to 2.5 times full load torque during startup which is well above the Torque demand by the Load (Compressor Inertia & Process Gas Load) during startup.
Being from Mechanical background, I am unable to understand if Motor actually develops Peak Torque as shown in the Curve ?
As this Torque is well above Load demand, how this Torque impacts/effects Load ? it is utilized in accelerating the Compressor quickly to Rated RPM ?
Generally Speaking do these type of Motors develop Peak Starting Torque exceeding the Load Demand ? and if So Peak Torque exceeding the Load demand manifests in rapid ramp up/acceleration of Compressor to rated RPM ?
We are facing problem of repeated Coupling Failures on a Centrifugal Compressor Train driven by a 2967 RPM, 2 pole, 3 phase, 50 Hz Squirrel Cage Induction Motor.
Attached is the Screenshot of Motor Curves showing Motor can develop up to 2.5 times full load torque during startup which is well above the Torque demand by the Load (Compressor Inertia & Process Gas Load) during startup.
Being from Mechanical background, I am unable to understand if Motor actually develops Peak Torque as shown in the Curve ?
As this Torque is well above Load demand, how this Torque impacts/effects Load ? it is utilized in accelerating the Compressor quickly to Rated RPM ?
Generally Speaking do these type of Motors develop Peak Starting Torque exceeding the Load Demand ? and if So Peak Torque exceeding the Load demand manifests in rapid ramp up/acceleration of Compressor to rated RPM ?