thesiswork
Student
Hello everyone, I am trying a non-linear transient analysis for my thesis project. I have tried different setups for my model but it does not work.
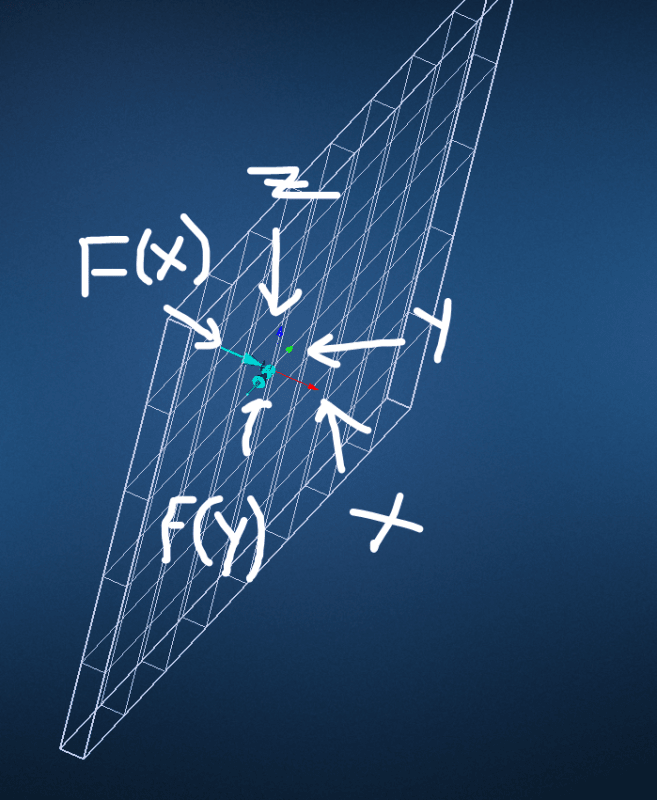
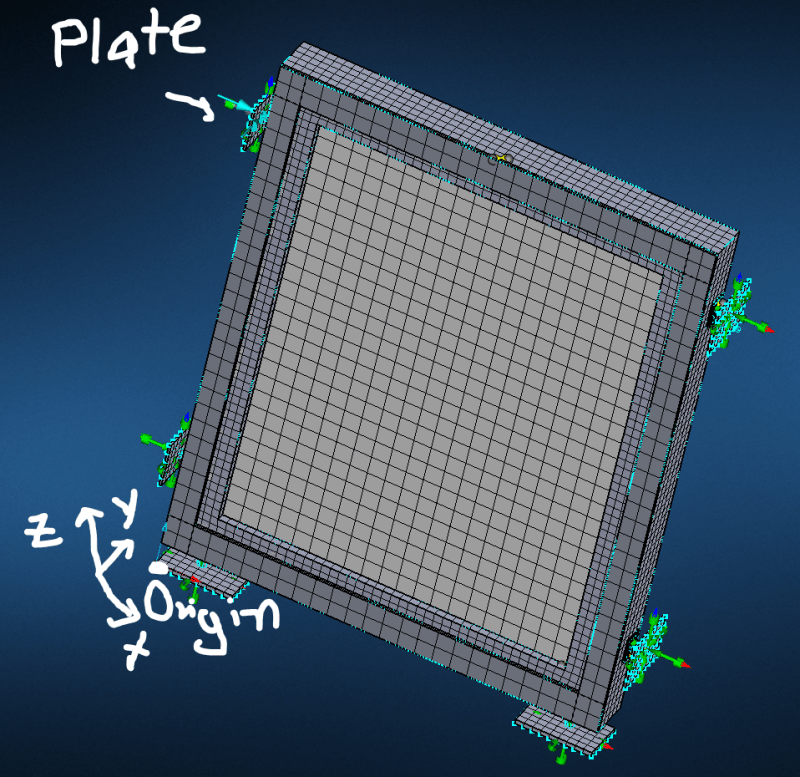
My task is to compare my model with the test data. I have 6 plates whose dof I can control by using general constraint. In these 6 plates for now 5 are completely constrained. One of them is constrained only in (Z, Rx, Ry, Rz), so the plate is free to move in (X, Y). In that plate, I am applying enforced motion (ACCE) in X and Y direction. That scenario does not converge.
I also tried freeing all the dofs (X, Y, Z, Rx, Ry, Rz) and apply enforce motion (ACCE) in (X, Y, Z) but again it diverges.
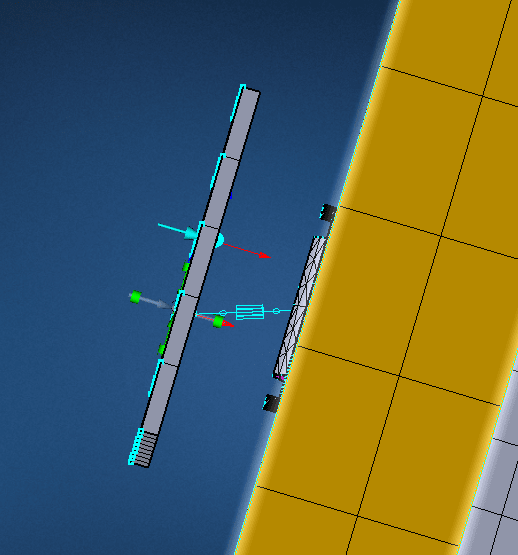
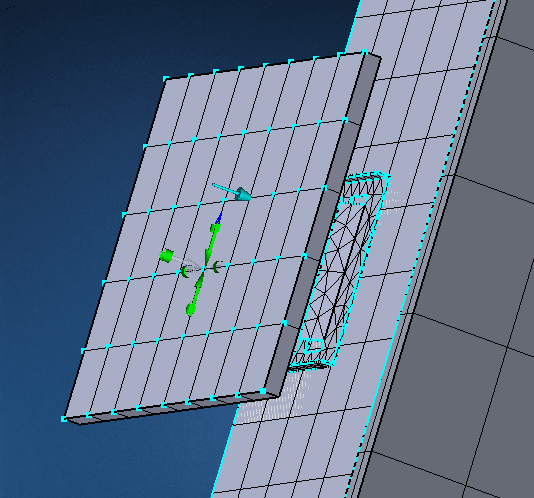
However, when I contrain (X, Z, Rx, Ry, Rz) and keep (Y) free and apply enforced motion (ACCE) in Y direction, the solution converges.
My task is to compare my model with the test data. I have 6 plates whose dof I can control by using general constraint. In these 6 plates for now 5 are completely constrained. One of them is constrained only in (Z, Rx, Ry, Rz), so the plate is free to move in (X, Y). In that plate, I am applying enforced motion (ACCE) in X and Y direction. That scenario does not converge.
I also tried freeing all the dofs (X, Y, Z, Rx, Ry, Rz) and apply enforce motion (ACCE) in (X, Y, Z) but again it diverges.
However, when I contrain (X, Z, Rx, Ry, Rz) and keep (Y) free and apply enforced motion (ACCE) in Y direction, the solution converges.