justAnEngineer95
Mechanical
Hi everyone,
If you have any experience with using automatic stabilization I would like you help with clarifying something.
Is it possible to fix the damping factor used? I have noticed that the it is still possible for it to increase during each increment, which causes the dissipated energy to exceed 5% of the total strain energy in the model as the simulation goes on until it ultimately converges.
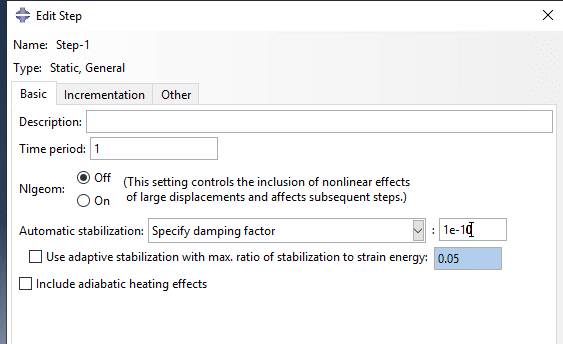
This was the behavior I expected from "specify dissipated energy fraction" as I have encountered here that the ratio may adjust itself, but not from "specify damping factor", where I expected that the damping factor would remain constant.
I have turned off the "use adaptive stablization with max ratio of strain energy" as I discovered that this was only a target value that still could get exceeded if Abaqus deemed it necessary.
Is it possible in Abaqus to cap the damping factor?
BR.
If you have any experience with using automatic stabilization I would like you help with clarifying something.
Is it possible to fix the damping factor used? I have noticed that the it is still possible for it to increase during each increment, which causes the dissipated energy to exceed 5% of the total strain energy in the model as the simulation goes on until it ultimately converges.
This was the behavior I expected from "specify dissipated energy fraction" as I have encountered here that the ratio may adjust itself, but not from "specify damping factor", where I expected that the damping factor would remain constant.
I have turned off the "use adaptive stablization with max ratio of strain energy" as I discovered that this was only a target value that still could get exceeded if Abaqus deemed it necessary.
Is it possible in Abaqus to cap the damping factor?
BR.