thorq
Mechanical
- Sep 27, 2015
- 9
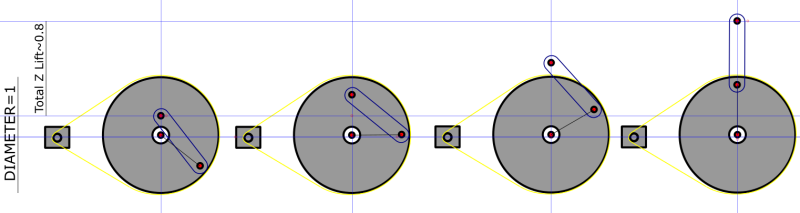
Hi, I am trying to design a lifting mechanism for a quite large (in area not weight) platform that only uses rotation for its actuation. I have a design that uses a mechanism similar to the slider-crank and I want to maximize the total height the platform can travel.
This is a sketch of my design:
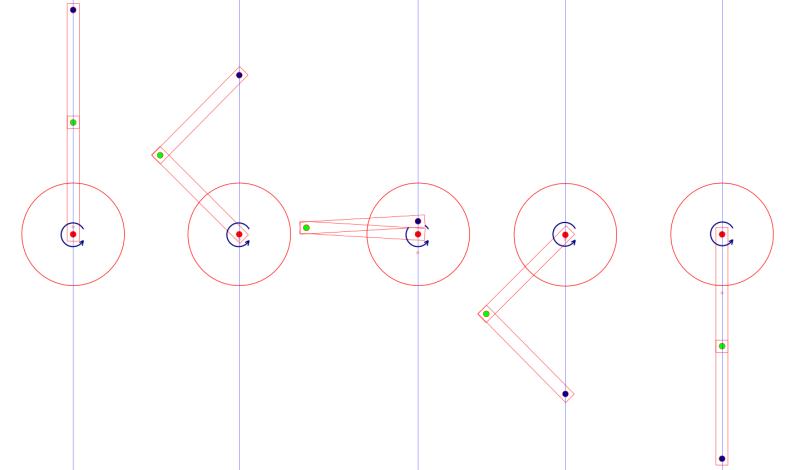
The rotation is going to be executed by a motor at the red dot and my dilemma is about the behavior of the two arms when they reach the position at the middle of above image. I think this is called a singularity or dead point.
If the platform is going down, the way I have suggested in the sketch, at that point I see a weak mechanical position when the platform will tend to fall more than it should because of its weight. This is where I would loose precision in movement and I need a solution to overcome this. Is this true? What are the weak points of this design? Just a note: there is going to be direction changes in rotation at arbitrary positions.
A preloaded spring was suggested to me but I don't exactly know how should that be setup, to which direction is better? Is there any other (simple/cheap) solution employed by other such mechanisms/robot arms?
I am also thinking about having gears at the green dot ends of both arms but that would introduce backlash when the rotation would be reversed.
PS: I don't want to change the slider-crank-based design to a leadscrew or something else, dut to other factors it has to be rotational.
Thank you for your suggestions.
This is a sketch of my design:
The rotation is going to be executed by a motor at the red dot and my dilemma is about the behavior of the two arms when they reach the position at the middle of above image. I think this is called a singularity or dead point.
If the platform is going down, the way I have suggested in the sketch, at that point I see a weak mechanical position when the platform will tend to fall more than it should because of its weight. This is where I would loose precision in movement and I need a solution to overcome this. Is this true? What are the weak points of this design? Just a note: there is going to be direction changes in rotation at arbitrary positions.
A preloaded spring was suggested to me but I don't exactly know how should that be setup, to which direction is better? Is there any other (simple/cheap) solution employed by other such mechanisms/robot arms?
I am also thinking about having gears at the green dot ends of both arms but that would introduce backlash when the rotation would be reversed.
PS: I don't want to change the slider-crank-based design to a leadscrew or something else, dut to other factors it has to be rotational.
Thank you for your suggestions.