Dear,
I have to design a table for a SCARA robot which will be mounted on top of this table. I'm not allowed to bolt the table (consisting of 4 legs bosch frame and aluminium top plate) on the ground (drilling of holes in the ground is not allowed). I need to know if the table will stand still or shake/move under the acceleration forces of the robot. The table should also not tip over under the acceleration forces of the robot.
I have a NX design of the table with top plate. In the top plate are four mounting holes for mounting the SCARA robot.
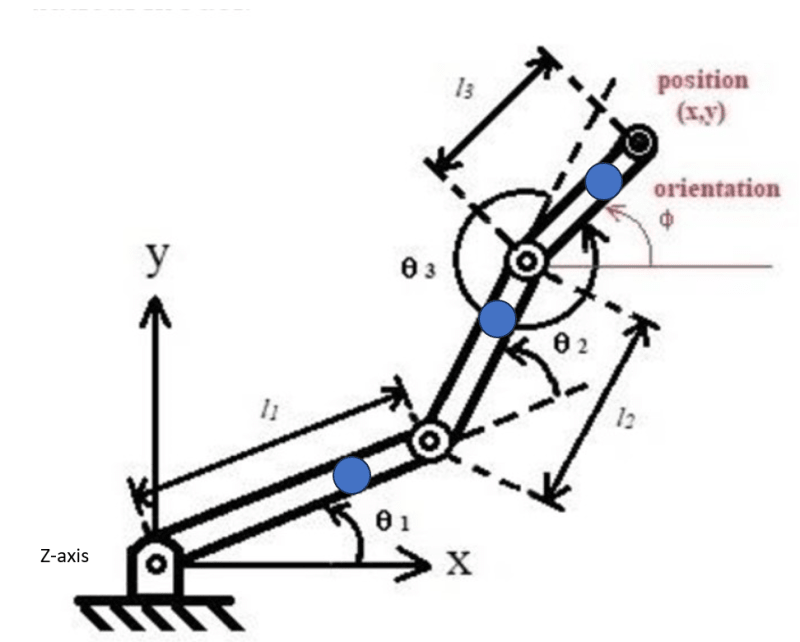
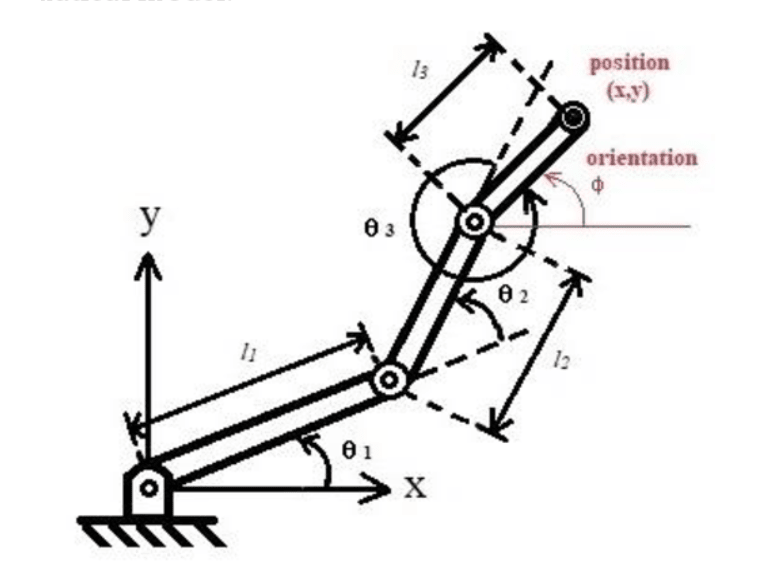
The SCARA robot consists of three joints/arms - see attached - and translates/rotates the end effector in the XY-plane.
I have the masses of the three arms, their lengths and their COG. I know the max. linear (radial) acceleration and rotation (theta) acceleration. I don't have detailed/CAD model of the SCARA robot.
I also know the reaction torque of the motors which rotate the arms.
How should I model this in ANSYS? I only need to check the worst case situation, i.e. stretched arm.
I have a license for static structural and modal analysis in ANSYS. Any suggestions are welcome.
Regards,
SC
I have to design a table for a SCARA robot which will be mounted on top of this table. I'm not allowed to bolt the table (consisting of 4 legs bosch frame and aluminium top plate) on the ground (drilling of holes in the ground is not allowed). I need to know if the table will stand still or shake/move under the acceleration forces of the robot. The table should also not tip over under the acceleration forces of the robot.
I have a NX design of the table with top plate. In the top plate are four mounting holes for mounting the SCARA robot.
The SCARA robot consists of three joints/arms - see attached - and translates/rotates the end effector in the XY-plane.
I have the masses of the three arms, their lengths and their COG. I know the max. linear (radial) acceleration and rotation (theta) acceleration. I don't have detailed/CAD model of the SCARA robot.
I also know the reaction torque of the motors which rotate the arms.
How should I model this in ANSYS? I only need to check the worst case situation, i.e. stretched arm.
I have a license for static structural and modal analysis in ANSYS. Any suggestions are welcome.
Regards,
SC