Hi there. Thanks for your attention.
I'm mechanical design engineer (maybe that's the root of the problem - I'm not that familiar with electrical realm of the question) and I fall short to find any plausible answer to the problem, described below, that perplexes me.
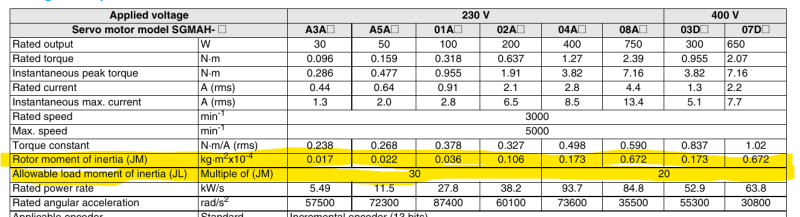
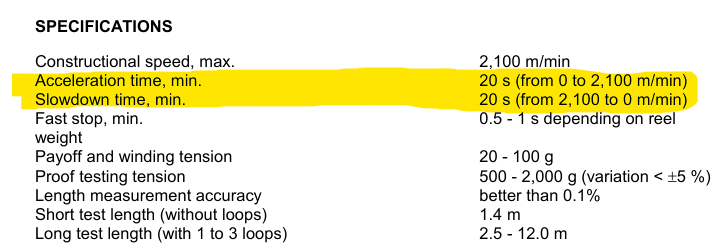
Since I'm working on a design of optical fiber rewinding machine (basically, the machine used to rewind the fiber from one reel to the other, maintaining the stable tension and winding pitch), I've made some kind of review of commercially available analogs. In one of the machines, that I’ve managed to become acquainted with, the reel is driven by direct drive (i.e. torque is transmitted in sequence servomotor -> disk coupling -> reel). The largest reel, compatible with this machine, as per datasheet, is 25 kg and 550 mm OD. Rated acceleration/deceleration time is 20 s (from angular speed 0 up to 127 s^-1), which makes the choice of the rated torque of the drive – 9,8 N-m – perfectly reasonable. But the thing the puzzles me so much is how is this drive supposed to cope with inertia of the load? The mass moment of inertia of the aforementioned reel is about 0,95 kg-m^2. Rotor inertia for this motor as per manufacturer datasheet is 0,0007 kg-m^2 and permissible load inertia factor is 5, i.e. maximum permissible load inertia is 0,0035 kg-m^2 – it’s incomparable with that of the reel.
Meanwhile this machine is considered as extremely reliable and well-designed by the end-user, and particularly there was no claims (never mind failures) on the reel drive system (I’m not sure that it’s appropriate to mention model and manufacturer name as it could be deemed as advertising).
For me (as a designer of the similar machine) this is a really important issue since I’m currently not sure depending on which characteristic should I base the motor sizing routing (because before I familiarized myself with this analog machine, I thought I’ll use 1:50 ratio planetary gearbox to reduce inertia in my design).
Could someone share at least a tiny cue for me to solve this issue?
Thanks in advance.
NX 10.0.3.5
I'm mechanical design engineer (maybe that's the root of the problem - I'm not that familiar with electrical realm of the question) and I fall short to find any plausible answer to the problem, described below, that perplexes me.
Since I'm working on a design of optical fiber rewinding machine (basically, the machine used to rewind the fiber from one reel to the other, maintaining the stable tension and winding pitch), I've made some kind of review of commercially available analogs. In one of the machines, that I’ve managed to become acquainted with, the reel is driven by direct drive (i.e. torque is transmitted in sequence servomotor -> disk coupling -> reel). The largest reel, compatible with this machine, as per datasheet, is 25 kg and 550 mm OD. Rated acceleration/deceleration time is 20 s (from angular speed 0 up to 127 s^-1), which makes the choice of the rated torque of the drive – 9,8 N-m – perfectly reasonable. But the thing the puzzles me so much is how is this drive supposed to cope with inertia of the load? The mass moment of inertia of the aforementioned reel is about 0,95 kg-m^2. Rotor inertia for this motor as per manufacturer datasheet is 0,0007 kg-m^2 and permissible load inertia factor is 5, i.e. maximum permissible load inertia is 0,0035 kg-m^2 – it’s incomparable with that of the reel.
Meanwhile this machine is considered as extremely reliable and well-designed by the end-user, and particularly there was no claims (never mind failures) on the reel drive system (I’m not sure that it’s appropriate to mention model and manufacturer name as it could be deemed as advertising).
For me (as a designer of the similar machine) this is a really important issue since I’m currently not sure depending on which characteristic should I base the motor sizing routing (because before I familiarized myself with this analog machine, I thought I’ll use 1:50 ratio planetary gearbox to reduce inertia in my design).
Could someone share at least a tiny cue for me to solve this issue?
Thanks in advance.
NX 10.0.3.5