BioMes
Bioengineer
- Nov 2, 2022
- 40
Hello everyone!
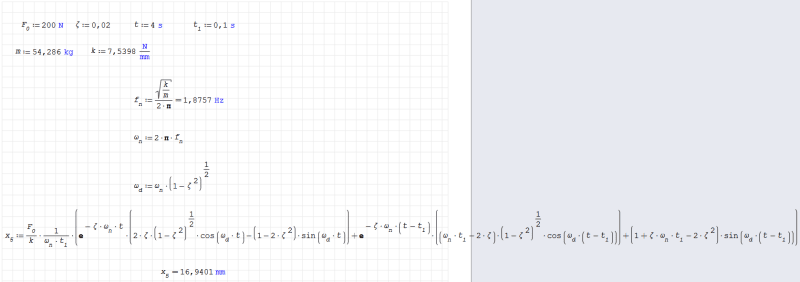
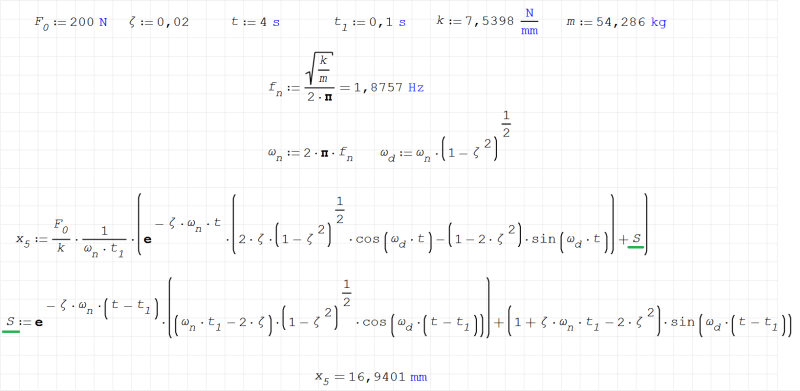
I'm working on a simple benchmark problem involving a spring-mass-damper system (for which I can get an analytical solution) modeled like this in Abaqus:
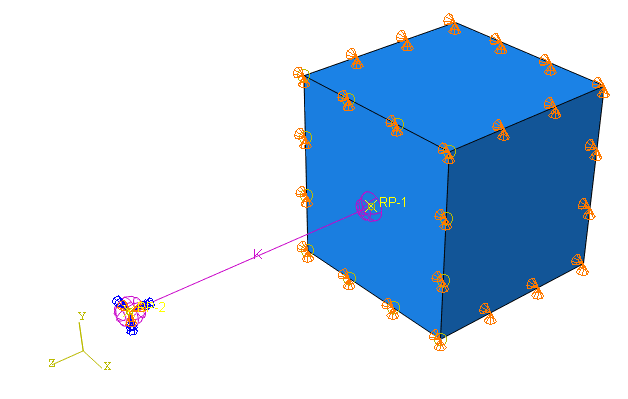
Currently, the damper is represented as modal damping with critical damping fraction for the natural frequency defined in the analysis step. The procedure is (transient) modal dynamics with a step time of 4 s and time increment of 0.1 s, utilizing a single mode shape from the preceding eigenfrequency extraction step. As you can see, the mass is simply a cube connected with a spring via a rigid body constraint. The spring is fixed at the other end.
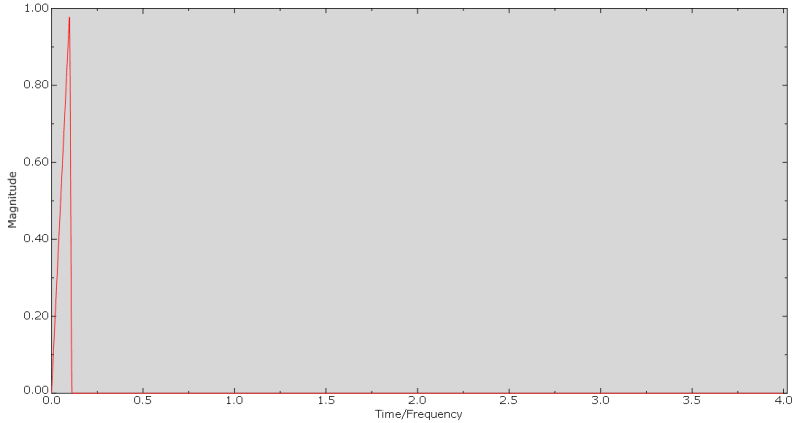
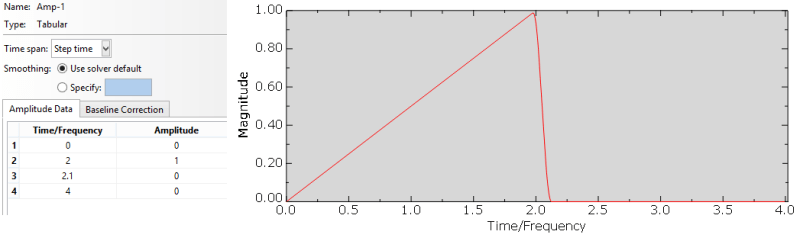
A tensile load is applied to the opposite side of the cube and the following amplitude is used for it:
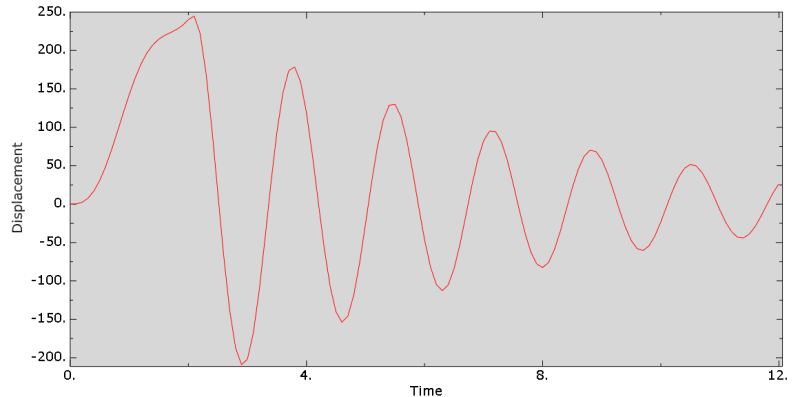
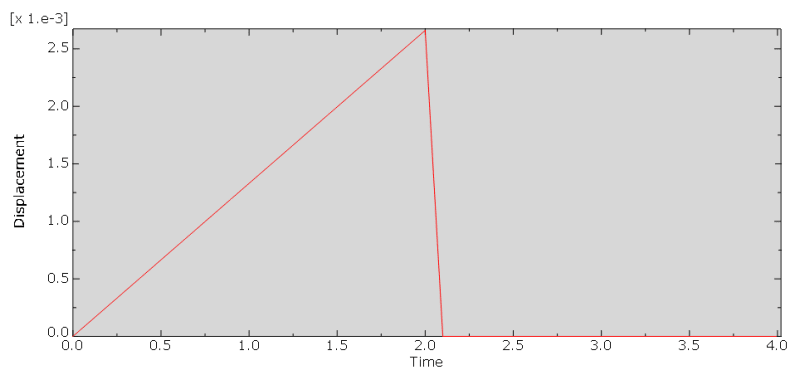
The problem is that I don't get any vibrations in results. Just a response (displacement of one of the nodes of the cube) equivalent to the applied amplitude and with the final displacement close to 0 (according to the analytical solution it shouldn't be zero for t=4 s):
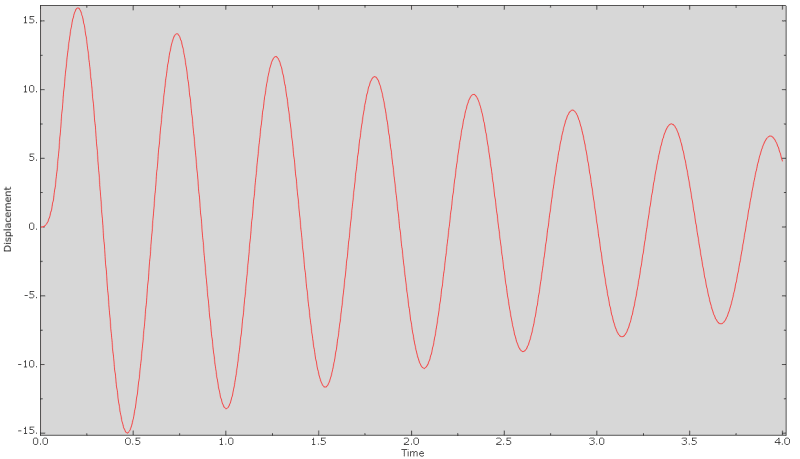
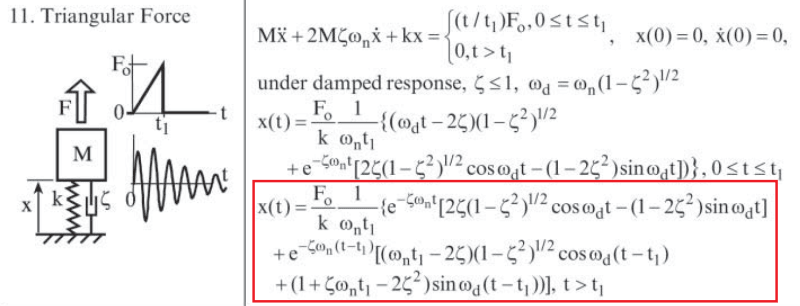
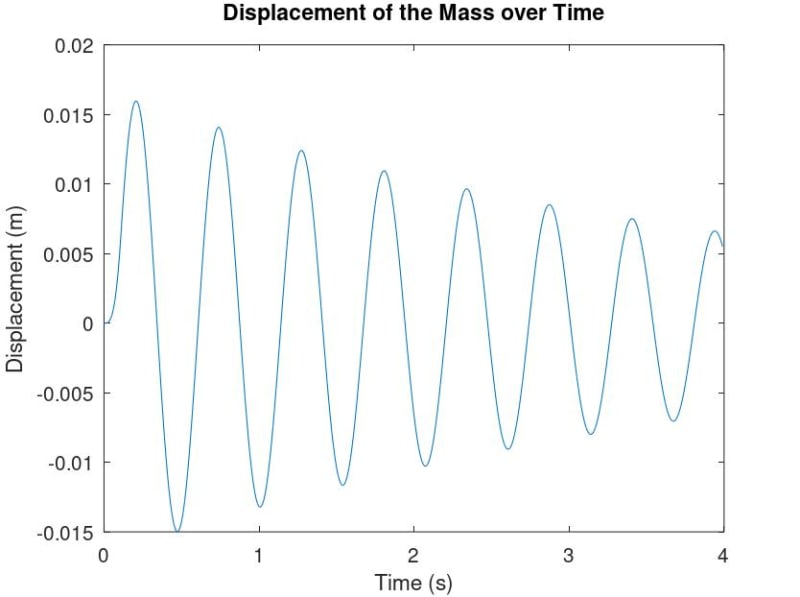
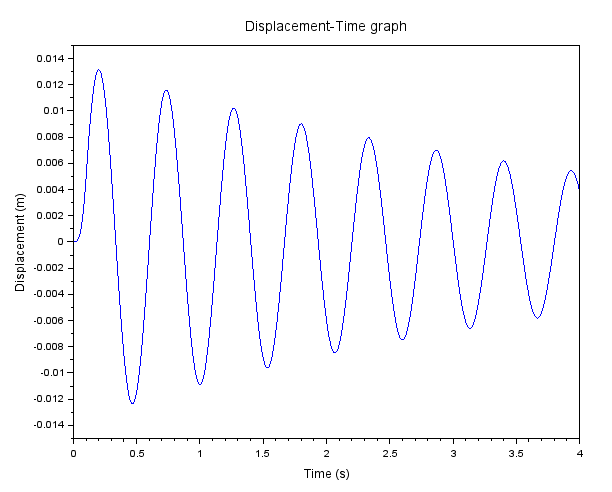
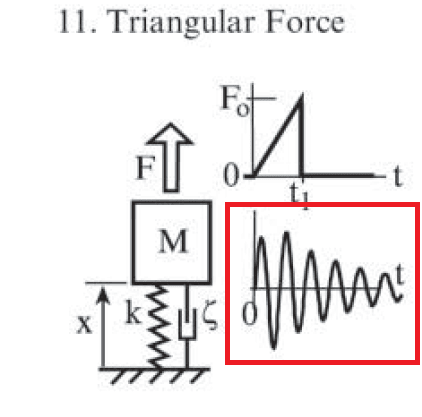
I would expect a response like this (from the Blevins' book):
Am I missing something here?
I'm working on a simple benchmark problem involving a spring-mass-damper system (for which I can get an analytical solution) modeled like this in Abaqus:
Currently, the damper is represented as modal damping with critical damping fraction for the natural frequency defined in the analysis step. The procedure is (transient) modal dynamics with a step time of 4 s and time increment of 0.1 s, utilizing a single mode shape from the preceding eigenfrequency extraction step. As you can see, the mass is simply a cube connected with a spring via a rigid body constraint. The spring is fixed at the other end.
A tensile load is applied to the opposite side of the cube and the following amplitude is used for it:
The problem is that I don't get any vibrations in results. Just a response (displacement of one of the nodes of the cube) equivalent to the applied amplitude and with the final displacement close to 0 (according to the analytical solution it shouldn't be zero for t=4 s):
I would expect a response like this (from the Blevins' book):
Am I missing something here?