Robo25
Automotive
- Jul 30, 2013
- 3
Good Morning All,
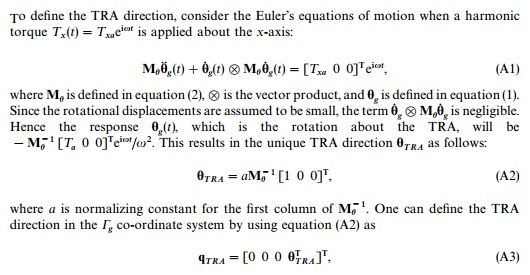
I am trying to calculate the torque roll axis for a powertrain system. After some research I know that the the calculation is only dependent on the moment of inertia and also after further research I have come across multiple papers from Singh (and referenced by almost everyone) which is the photo listed above. I have created some matlab code in trying to calculate the TRA direction but don't seem to be obtaining the right values. I was wondering if anyone could tell me where I am going wrong or have any other reference that I could perhaps follow.
I have the following inertia matrix (M_theta):
I=[2.519 4.458 4.409 -.1678 .5385 -.0947];
and should receive TRA_Direction as: [0 0 0 .992113 .0347851 .120426] but I do not. Is there anything that I am missing here when normalizing the first column or taking the inverse?
function[TRA_Direction]= TRA_Direction(I)
% User Input
% I: Moment of Inertia Matrix expressed as [Ixx,Iyy,Izz,Ixy,Ixz,Iyz]
%
% Output
% TRA_Direction: The Direction of the TRA
%Mass Inertia Matrix
M_Theta=zeros(3,3);
M_Theta(1,1)=I(1);
M_Theta(1,2)=-I(4);
M_Theta(1,3)=-I(5);
M_Theta(2,1)=-I(4);
M_Theta(2,2)=I(2);
M_Theta(2,3)=-I(6);
M_Theta(3,1)=-I(5);
M_Theta(3,2)=-I(6);
M_Theta(3,3)=I(3);
Inv_M_Theta=inv(M_Theta);
a=norm([Inv_M_Theta(1,1) Inv_M_Theta(2,1) Inv_M_Theta(3,1)]);
Torque_Axis=[1 0 0];
Theta_TRA=a*Inv_M_Theta*Torque_Axis';
TRA_Direction=[0 0 0 Theta_TRA']';