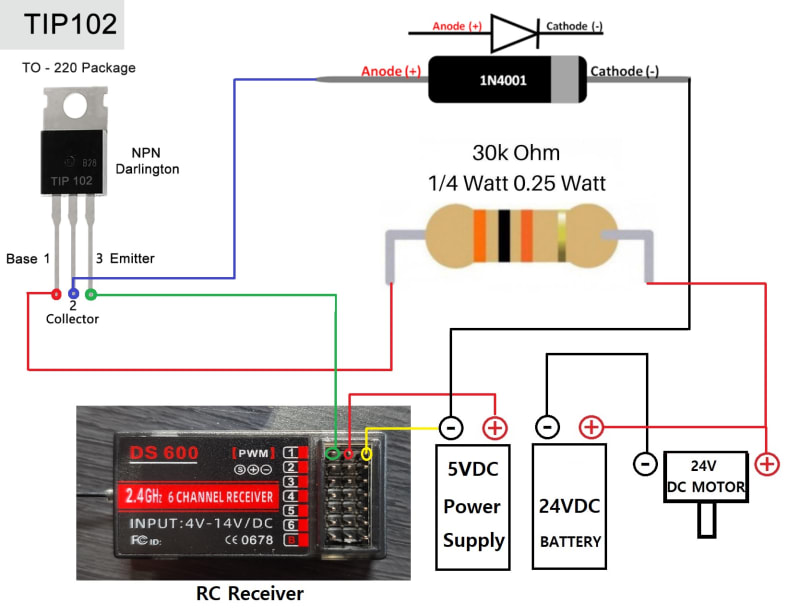
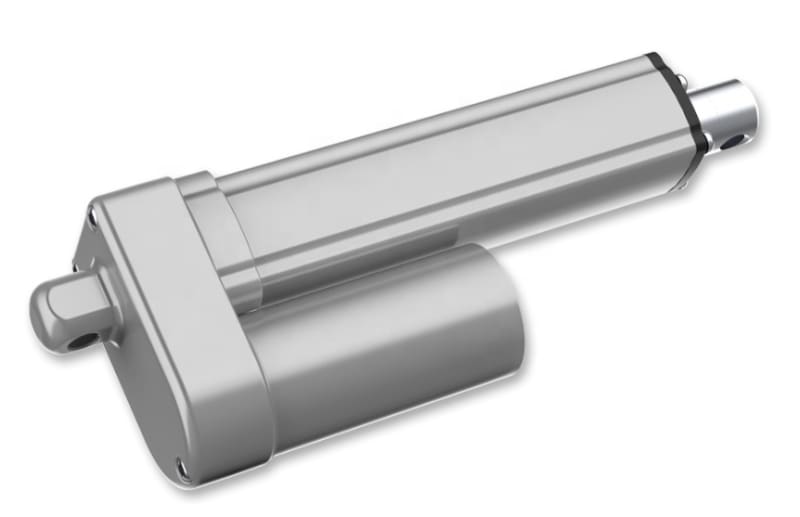
Hi, I am trying to get my 24V(70W) motor turn on and off using my remote controller.
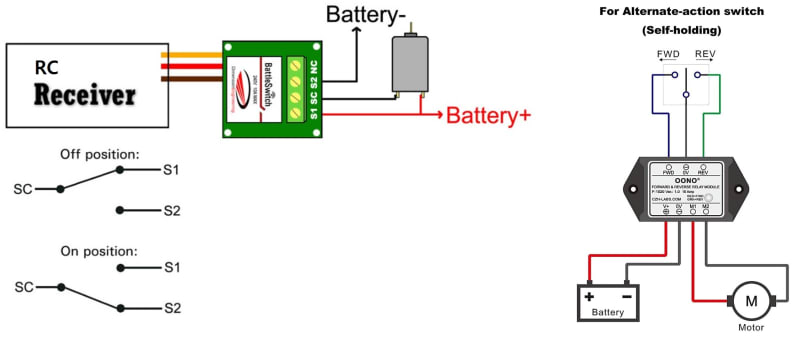
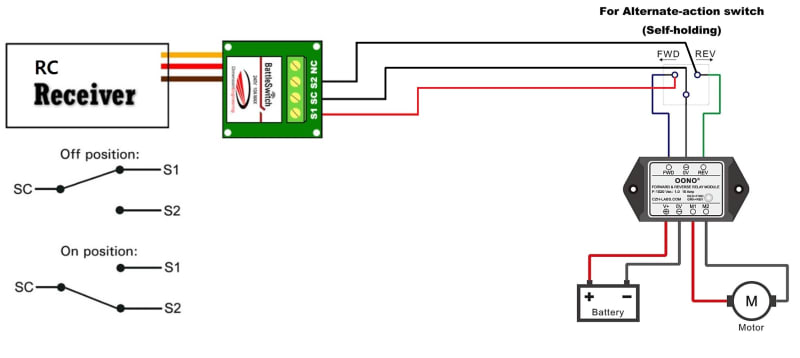
This remote controller puts out PWM from its receiver so I want to be able to control on & off action of my motor using a remote control.
Is there a simple tutorial or circuit to follow?
Thank you.
This remote controller puts out PWM from its receiver so I want to be able to control on & off action of my motor using a remote control.
Is there a simple tutorial or circuit to follow?
Thank you.