I have a very very sensitive x-ray microscope that weighs 4600 lbs. this device is designed to be move in and out of position. It is currently sitting on a 4 point kinematic mount with 4- 1" dia stainless steel balls on every corner. ( 3 corners drop into corresponding vee block and one corner sits on a flat plate) To move this device we manually crank up the ball mounts and the frame drops onto wheels so it can be moved.
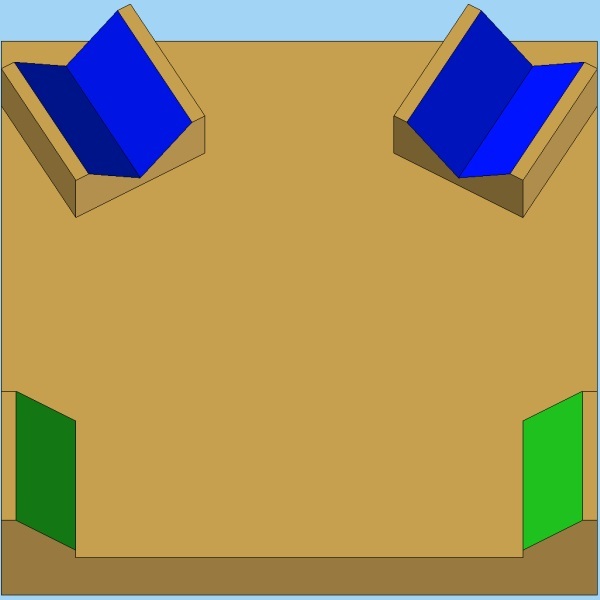
The issue is that the device does not drop back into position accurately. It needs several raise and lower attempts to get it back into the vee blocks. I see there are tungsten carbide " canoe spheres" that might improve the repetitive accuracy.
but
A point was brought up that these "Canoe Spheres"
add a larger overall footprint ( contact surface) to the device and it could potentially amplify known vibration from the floor into this device. IS THIS POSSIBLE??? will a larger footprint potentially cause more vibration?
thanks for the input ...
The issue is that the device does not drop back into position accurately. It needs several raise and lower attempts to get it back into the vee blocks. I see there are tungsten carbide " canoe spheres" that might improve the repetitive accuracy.
but
A point was brought up that these "Canoe Spheres"
add a larger overall footprint ( contact surface) to the device and it could potentially amplify known vibration from the floor into this device. IS THIS POSSIBLE??? will a larger footprint potentially cause more vibration?
thanks for the input ...

![URL]](https://res.cloudinary.com/engtips/image/fetch/w_800,c_lfill,q_auto,f_auto,g_faces:center/[URL unfurl="true"]http://www.precisionballs.com/images/pg27.jpg[/URL])