ChrisDanger
Mechanical
I'm busy with a force analysis of a crawler, pictured below, using Excel. I've colour-coded the main parts into (static) body, yoke, [COLOR= #204A87]boom[/color] and nozzle. I've quickly drawn in the cylinders, but there are 3 pairs: the body/yoke pair swivels the yoke, the yoke/boom pair lifts and lowers the boom, and the final pair lifts and lowers the nozzle.
![URL]](https://res.cloudinary.com/engtips/image/fetch/w_800,c_lfill,q_auto,f_auto,g_faces:center/[URL unfurl="true"]http://u.cubeupload.com/ChrisDanger/Crawler.png[/URL])
Here's a simplified diagram of the forces, where (generally) the cylinder forces are labeled F, and the reaction forces are labeled R. (I'm neglecting the weights and the nozzle suction force.)
![URL]](https://res.cloudinary.com/engtips/image/fetch/w_800,c_lfill,q_auto,f_auto,g_faces:center/[URL unfurl="true"]http://u.cubeupload.com/ChrisDanger/Diagram.png[/URL])
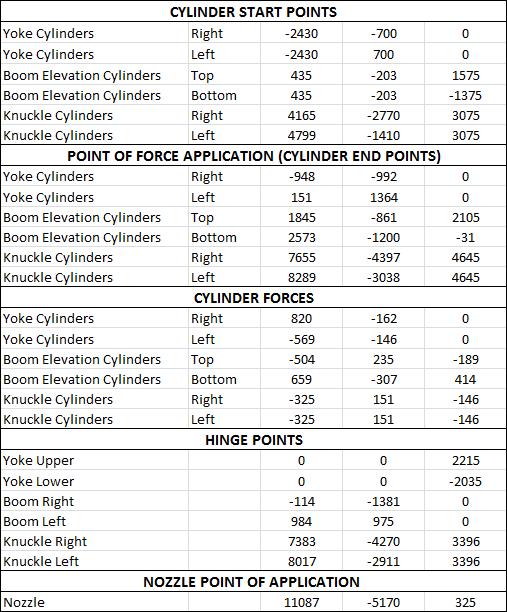
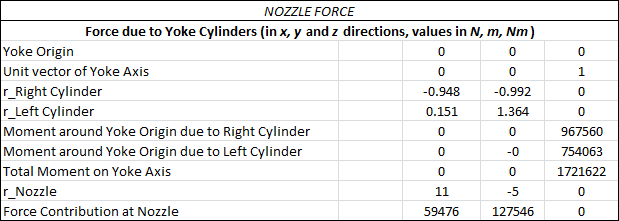
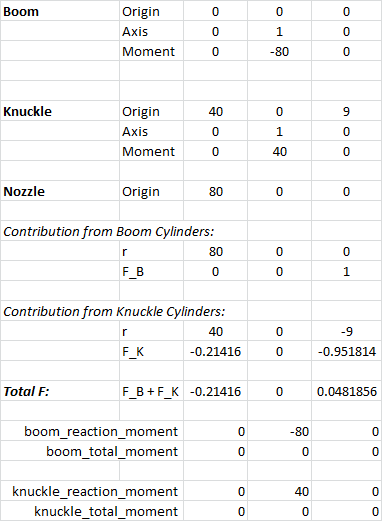
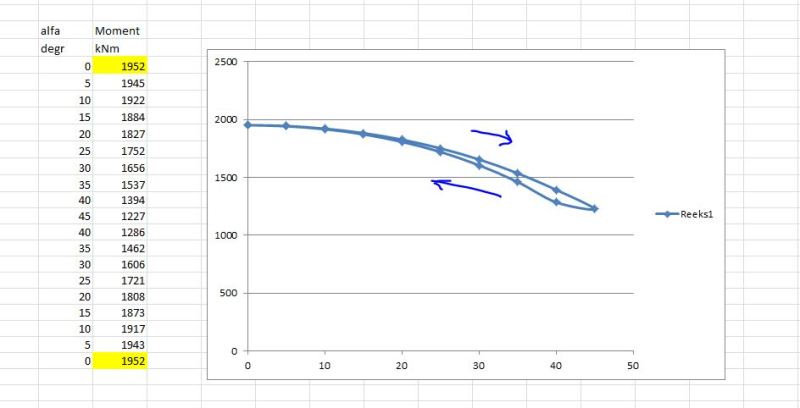
All I need to calculate is the resultant force on the nozzle for activation of the cylinders for any arbitrary position. I have the cylinder forces, and all the displacements calculated for whatever angles the respective hinges may be in. So now I just need the final piece of the puzzle: the nozzle force!
I'm running into several issues. I thought I could do this like a mechanism, using vectors. But with so many unknowns and the complexity of vector algebra, solving for multiple unknown vectors is impossible (it seems). I'm just really unsure how to proceed. Can I disregard the reaction forces and consider the cylinder forces acting in isolation, and simply sum their effect on the nozzle? Or do I need to write out the full equations for each "link", summing forces and moments to yield a full set of simultaneous equations, then solve that system?
Everything I've seen online just has simplified 2D analyses, like for backhoe excavators. I assume this is a fairly trivial problem for something like an FEA solver, but even that methodology is not the right tool I don't think.
Here's a simplified diagram of the forces, where (generally) the cylinder forces are labeled F, and the reaction forces are labeled R. (I'm neglecting the weights and the nozzle suction force.)
All I need to calculate is the resultant force on the nozzle for activation of the cylinders for any arbitrary position. I have the cylinder forces, and all the displacements calculated for whatever angles the respective hinges may be in. So now I just need the final piece of the puzzle: the nozzle force!
I'm running into several issues. I thought I could do this like a mechanism, using vectors. But with so many unknowns and the complexity of vector algebra, solving for multiple unknown vectors is impossible (it seems). I'm just really unsure how to proceed. Can I disregard the reaction forces and consider the cylinder forces acting in isolation, and simply sum their effect on the nozzle? Or do I need to write out the full equations for each "link", summing forces and moments to yield a full set of simultaneous equations, then solve that system?
Everything I've seen online just has simplified 2D analyses, like for backhoe excavators. I assume this is a fairly trivial problem for something like an FEA solver, but even that methodology is not the right tool I don't think.