I just checked your .inp file, here are my 2 cents regarding minimizing the KE output:
1) Increase your step time, as a previous user said, to control KE you will need to apply the velocity/displacement BC over a longer period of time; might require some trial and error. Another solution would be to use slower velocities.
2) Use the smooth amplitude function instead of the tabular one to apply your velocities. This will limit the sudden jerks or "noise" in your energy output.
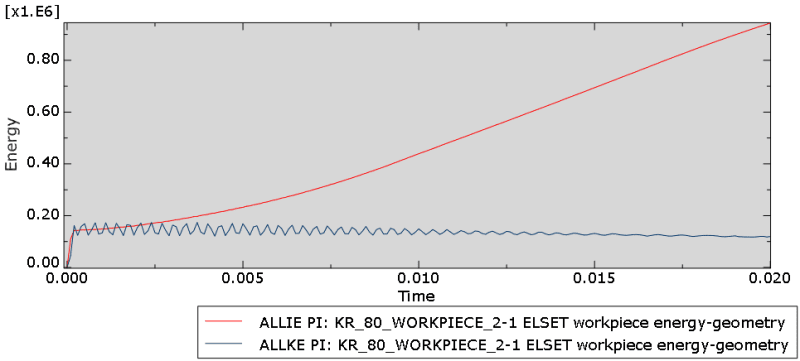
3) Again, as the other users pointed out, you need to look at the whole energy output and monitor each energy output individually to guarantee the quality and accuracy of your solution. If you want to maintain quasi-static conditions in your simulation, then yes keeping KE in check is essential. If you're running an impact analysis, a sudden increase in KE is expected.
4) I think your mesh is too fine. In explicit analysis the stable time increment is controlled by the material properties and size of the element. Since you want to limit the mass scaling factor to control KE, try making the mesh a bit coarser to get more efficient run times.
5) Most of the points I have pointed out are mentioned in detailed in the manual. Go through the explicit dynamics section, and more importantly go through the example problems in the getting started with abaqus manual. The "circuit drop" and "channel forming" examples have some good information regarding explicit analysis.
Hope this helps, good luck.
![[sadeyes]](/data/assets/smilies/sadeyes.gif "[sadeyes] [sadeyes]") .
.