Nir_k
Mechanical
- Apr 13, 2021
- 41
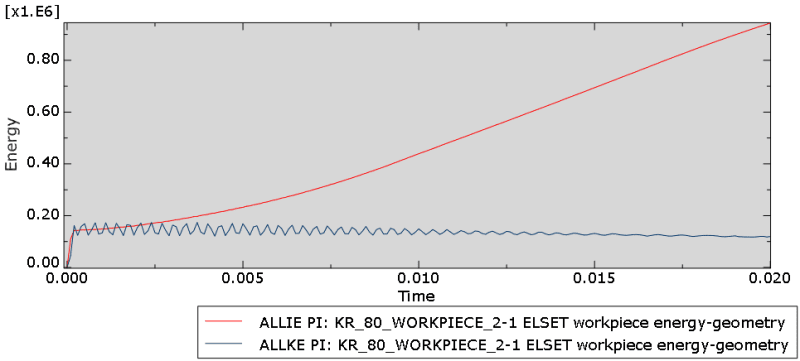
Hi all, I was running an explicit simulation on Abaqus. I wonder if I don't use the mass scaling to speed up my simulation, but the kinetic energy is far more than 5% of internal energy, does the result match the real phenomenon? Thanks.
![[sadeyes]](/data/assets/smilies/sadeyes.gif "[sadeyes] [sadeyes]") .
.