pmarc
Mechanical
- Sep 2, 2008
- 3,227
Hi,
Throughout the years I have come to a conclusion that in general there are not many examples where changing dimensioning and tolerancing scheme from one to another would keep the geometric requirements for the system unchanged.
One example where this conclusion would not be true is changing from perpendicularity wrt A to total runout wrt A when applied to a flat face normal to datum axis A.
Another one would be a simple bushing where its ID and OD are controlled with the same +/- tolerance, and then it does not really matter which of the features will be datum feature A and which will be controlled with position or runout relative to A.
I have some more, but I would like to see what others can offer. So could anyone share some examples?
Throughout the years I have come to a conclusion that in general there are not many examples where changing dimensioning and tolerancing scheme from one to another would keep the geometric requirements for the system unchanged.
One example where this conclusion would not be true is changing from perpendicularity wrt A to total runout wrt A when applied to a flat face normal to datum axis A.
Another one would be a simple bushing where its ID and OD are controlled with the same +/- tolerance, and then it does not really matter which of the features will be datum feature A and which will be controlled with position or runout relative to A.
I have some more, but I would like to see what others can offer. So could anyone share some examples?
![[ponder]](/data/assets/smilies/ponder.gif "[ponder] [ponder]")
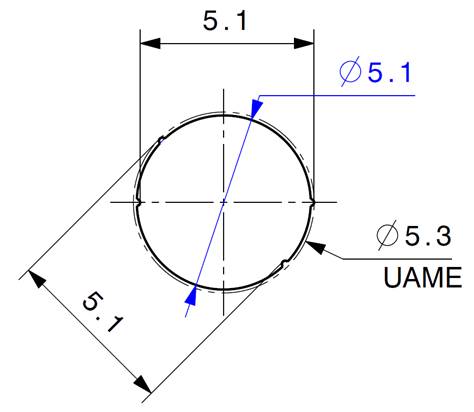
![[sad]](/data/assets/smilies/sad.gif "[sad] [sad]") ). The total allowed form error is 0.2. In the second scheme, if the note PERFECT FORM AT MMC NOT REQUIRED wasn't included, the two cases were the same but the cylindricity tolerance would be redundant. Sorry for the bad example
). The total allowed form error is 0.2. In the second scheme, if the note PERFECT FORM AT MMC NOT REQUIRED wasn't included, the two cases were the same but the cylindricity tolerance would be redundant. Sorry for the bad example ![[blush]](/data/assets/smilies/blush.gif "[blush] [blush]")