cliff turnell
Mechanical
- May 7, 2019
- 22
Good Day Group,
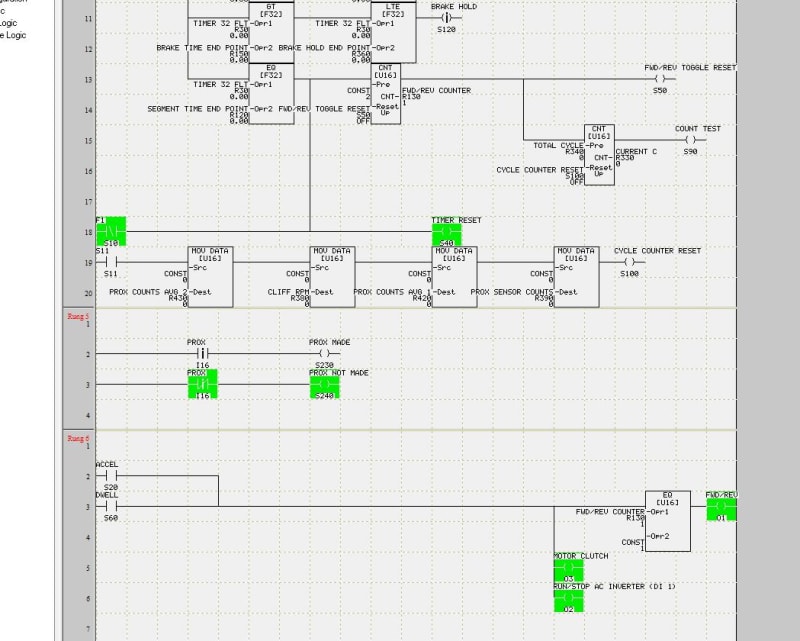
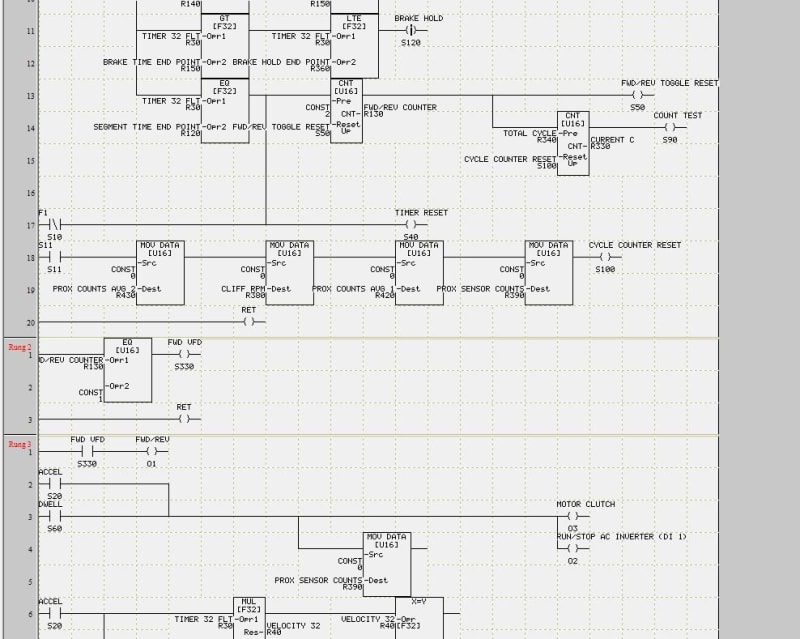
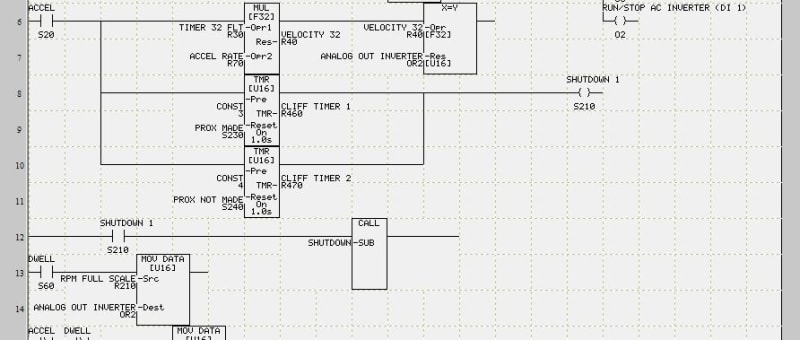
I am having an issue between my logic and the VFD that is controlling my motor. The VFD is an Automation Direct GS1. In my logic O2 is run/stop and O1 is direction (closed = CW and open = CCW, rung 6, line 3). What I am trying to accomplish is "if counter is equal to 1 then energize coil" (top rung line 15)and when the coil goes high the corresponding N.O. contact on rung 6, line 3 will close and energize coil O1 to change direction. For some reason I cannot get O1 to change states and am not sure if it might be my logic or an issue with the VFD. It seems pretty straight forward to me but obviously I am missing something and am hoping another set of eyes night be able to see something I am missing. For reference rung 4 (the top rung) is timing and rung 6 is motion. Thank you all in advance and have a great day!
Regards,
Cliff
I am having an issue between my logic and the VFD that is controlling my motor. The VFD is an Automation Direct GS1. In my logic O2 is run/stop and O1 is direction (closed = CW and open = CCW, rung 6, line 3). What I am trying to accomplish is "if counter is equal to 1 then energize coil" (top rung line 15)and when the coil goes high the corresponding N.O. contact on rung 6, line 3 will close and energize coil O1 to change direction. For some reason I cannot get O1 to change states and am not sure if it might be my logic or an issue with the VFD. It seems pretty straight forward to me but obviously I am missing something and am hoping another set of eyes night be able to see something I am missing. For reference rung 4 (the top rung) is timing and rung 6 is motion. Thank you all in advance and have a great day!
Regards,
Cliff