OscarPacheco
Mechanical
Hello to all!
I am trying to simulate a frontal crash and see the reactions of this to the cervical spine.
I have some doubts about how to input the acceleration resulting of the crash in my model. At this moment I am trying two options but it seems they are not working somehow.
1- Input with value 4g as "Gravity" load in the direction of the crash. It seems that no motion is being obtained...
2- Input "Acceleration/rotation acceleration" 4g as a boundary condition.
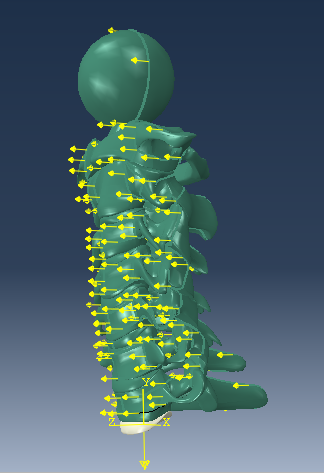
Please find hereunder a image of my model; the acceleration in both cases is applied to the whole model except for the lower intervertebral disc (in grey). I do this because there is an encastre there and I dont want the model to move as a whole, but keep this disc fixed.
I am acting ok? Do you have any othe ideas? They are all welcomed!!
Thank you very much.
Regards,
Oscar
I am trying to simulate a frontal crash and see the reactions of this to the cervical spine.
I have some doubts about how to input the acceleration resulting of the crash in my model. At this moment I am trying two options but it seems they are not working somehow.
1- Input with value 4g as "Gravity" load in the direction of the crash. It seems that no motion is being obtained...
2- Input "Acceleration/rotation acceleration" 4g as a boundary condition.
Please find hereunder a image of my model; the acceleration in both cases is applied to the whole model except for the lower intervertebral disc (in grey). I do this because there is an encastre there and I dont want the model to move as a whole, but keep this disc fixed.
I am acting ok? Do you have any othe ideas? They are all welcomed!!
Thank you very much.
Regards,
Oscar
")