Ok,
I don't think you have static equilibrium. At rest I think you do, 'cause I think there's other structure that the ramp is resting on.
I think the two links are parallel, yes or no ?
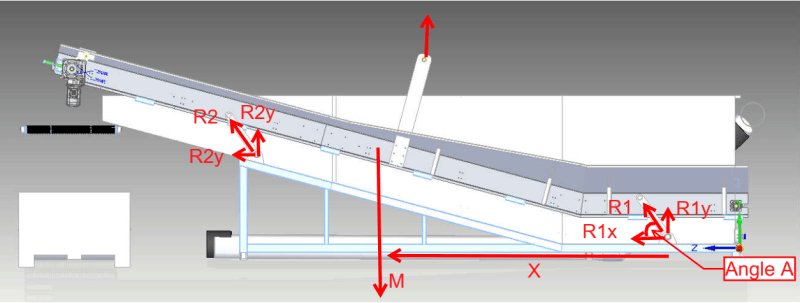
The two links are axial members.
The ramp when force F is applied will move (upwards and laterally) as the links rotate;
Until the links are aligned with the force F direction.
Now we have a geometry we can solve statically, and simply (like a SS beam).
Oh, I forgot about the weight.
Now the ramp becomes a three force body.
The forces in the links will have a common direction (parallel), so can be considered one force vector.
The weight is known (dividing between the two sides is reasonable).
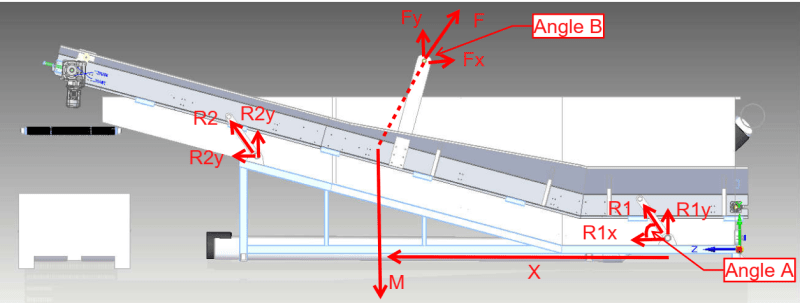
The applied force, F, is known, well is determined from geometry, but it's direction is known.
Then these three forces make a triangle. You know the three direction, so you can draw a triangle. You know one side, weight, so you know the other two magnitudes.
The remaining thing is to sort out the link loads, moments about one link attach pt would tell you the other link load, and so you'd have both.
And then solve for different positions, as the ramp is lifted and the links rotate.
another day in paradise, or is paradise one day closer ?